
Nội dung toàn văn Quy chuẩn kỹ thuật Quốc gia QCVN 42:2011/BTTTT về thiết bị vô tuyến lưu động mặt đất có ăng ten rời dùng cho truyền số liệu – và thoại do Bộ trưởng Bộ Thông tin và Truyền thông ban hành
QUY CHUẨN KỸ THUẬT QUỐC GIA
QCVN 42:2011/BTTTT
VỀ THIẾT BỊ VÔ TUYẾN LƯU ĐỘNG MẶT ĐẤT
CÓ ĂNG TEN RỜI DÙNG CHO TRUYỀN SỐ LIỆU (VÀ THOẠI)
National technical regulation
on land mobile radio equipment having an antenna connector intended for the transmission of data (and speech)
HÀ NỘI – 2011
MỤC LỤC
1. QUY ĐỊNH CHUNG
1.1. Phạm vi điều chỉnh
1.2. Đối tượng áp dụng
1.3. Giải thích từ ngữ
1.4. Ký hiệu
1.5. Chữ viết tắt
2. QUY ĐỊNH KỸ THUẬT
2.1. Môi trường hoạt động
2.2. Các yêu cầu đối với máy phát
2.2.1. Sai số tần số
2.2.2 Công suất sóng mang (dẫn)
2.2.3. Công suất bức xạ hiệu dụng (cường độ trường)
2.2.4. Công suất kênh lân cận
2.2.5. Phát xạ giả
2.2.6. Suy hao xuyên điều chế
2.2.7. Thời gian kích hoạt máy phát
2.2.8. Thời gian khử hoạt máy phát
2.2.9. Quá độ của máy phát
2.3. Các yêu cầu đối với máy thu
2.3.1. Độ nhạy (số liệu hoặc bản tin)
2.3.2. Triệt nhiễu đồng kênh
2.3.3. Độ chọn lọc kênh lân cận
2.3.4. Triệt đáp ứng giả
2.3.5. Triệt đáp ứng xuyên điều chế
2.3.6. Nghẹt
2.3.7. Bức xạ giả
2.3.8. Giảm nhạy máy thu
2.3.9. Triệt đáp ứng giả máy thu
3. PHƯƠNG PHÁP ĐO KIỂM
3.1. Các điều kiện môi trường
3.1.1. Các điều kiện đo bình thường và tới hạn
3.1.2. Nguồn công suất đo kiểm
3.1.3. Lựa chọn thiết bị đo
3.2. Đánh giá kết quả đo
4. QUY ĐỊNH VỀ QUẢN LÝ
5. TRÁCH NHIỆM CỦA TỔ CHỨC, CÁ NHÂN
6. TỔ CHỨC THỰC HIỆN
Phụ lục A (Quy định) Đo trường bức xạ
Phụ lục B (Quy định) Các điều kiện chung
Lời nói đầu
QCVN 42 : 2011/BTTTT được xây dựng trên cơ sở soát xét, chuyển đổi Tiêu chuẩn Ngành TCN 68 – 229:2005 “Thiết bị vô tuyến lưu động mặt đất có ăng ten rời dùng cho truyền số liệu (và thoại) – Yêu cầu kỹ thuật” ban hành theo Quyết định số 28/2005/QĐ-BBCVT ngày 17/8/2005 của Bộ trưởng Bộ Bưu chính, Viễn thông (nay là Bộ Thông tin và Truyền thông).
Các quy định kỹ thuật và phương pháp đo của QCVN 42 : 2011 phù hợp với Tiêu chuẩn quốc tế ETSI EN 300 113-2 V1.1.1 (3-2001) của Viện Tiêu chuẩn Viễn thông châu Âu (ETSI).
QCVN 42 : 2011/BTTTT do Viện Khoa học Kỹ thuật Bưu điện biên soạn, Vụ Khoa học và Công nghệ trình duyệt và Bộ Thông tin và Truyền thông ban hành theo Thông tư số 26/2011/TT-BTTTT ngày 04/10/2011 của Bộ trưởng Bộ Thông tin và Truyền thông.
QUY CHUẨN KỸ THUẬT QUỐC GIA
VỀ THIẾT BỊ VÔ TUYẾN LƯU ĐỘNG MẶT ĐẤT CÓ ĂNG TEN RỜI DÙNG CHO TRUYỀN SỐ LIỆU (VÀ THOẠI)
National technical regulation
on land mobile radio equipment having an antenna connector intended for the transmission of data (and speech)
1. QUY ĐỊNH CHUNG
1.1. Phạm vi điều chỉnh
Quy chuẩn này áp dụng cho các hệ thống điều chế góc có đường bao không đổi trong nghiệp vụ lưu động mặt đất, sử dụng các băng thông hiện có, hoạt động ở các tần số vô tuyến giữa 30 MHz và 1 GHz, với các khoảng cách kênh 12,5 kHz và 25 kHz, với mục đích truyền số liệu.
Quy chuẩn này áp dụng cho thiết bị vô tuyến số và thiết bị kết hợp tương tự/số có ăng ten rời với mục đích truyền số liệu và/hoặc thoại. Quy chuẩn kỹ thuật quốc gia này áp dụng cho các loại thiết bị sau:
– Trạm gốc (thiết bị có ổ cắm ăng ten được sử dụng ở vị trí cố định);
– Trạm di động (thiết bị có ổ cắm ăng ten thường được sử dụng trên một phương tiện vận tải hoặc như một trạm lưu động);
– Máy cầm tay:
+ Có ổ cắm ăng ten; hoặc
+ Không có ổ cắm ăng ten ngoài (thiết bị ăng ten liền), nhưng có đầu nối tần số vô tuyến 50 cố định hoặc tạm thời bên trong cho phép nối với đầu ra máy phát và đầu vào máy thu.
Máy cầm tay không có đầu nối tần số vô tuyến bên trong hoặc bên ngoài và không có đầu nối tần số vô tuyến 50 không thuộc phạm vi của Quy chuẩn này.
1.2. Đối tượng áp dụng
Quy chuẩn này được áp dụng đối với các tổ chức, cá nhân Việt Nam và nước ngoài có hoạt động sản xuất, kinh doanh các thiết bị thuộc phạm vi điều chỉnh của Quy chuẩn này trên lãnh thổ Việt Nam.
1.3. Giải thích từ ngữ
1.3.1. Trạm gốc (base station)
Thiết bị có ổ cắm ăng ten để sử dụng với ăng ten ngoài và ở vị trí cố định.
1.3.2. Trạm di động (mobile station)
Thiết bị di động có ổ cắm ăng ten để sử dụng với ăng ten ngoài, thường được sử dụng trên một phương tiện vận tải hoặc như một trạm lưu động.
1.3.3. Máy cầm tay (hand portable station)
Thiết bị có ổ cắm ăng ten hoặc ăng ten liền, hoặc cả hai, thường được sử dụng độc lập, có thể mang theo người hoặc cầm tay.
1.3.4. Ăng ten liền (integral antenna)
Ăng ten được thiết kế để gắn vào thiết bị mà không sử dụng đầu nối ngoài 50 và được coi là một phần của thiết bị. Ăng ten liền có thể được gắn cố định bên trong hoặc bên ngoài thiết bị.
1.3.5. Điều chế góc (angle modulation)
Điều chế pha hoặc điều chế tần số.
1.3.6. Các phép đo dẫn (conducted measurements)
Các phép đo sử dụng kết nối 50 trực tiếp với thiết bị cần đo.
1.3.7. Các phép đo bức xạ (radiated measurements) Các phép đo giá trị tuyệt đối của trường bức xạ.
1.3.8. Bit (binary digit) Số nhị phân.
1.3.9. Khối (block)
Lượng thông tin nhỏ nhất được gửi qua kênh vô tuyến. Một số cố định các bit có ích được gửi cùng với nhau và với các bit thông tin dư.
1.3.10. Gói (packet)
Một khối hoặc dòng các khối kế tiếp được truyền đi bởi một máy phát (logic) tới một máy thu hoặc một nhóm máy thu.
1.4. Ký hiệu
Eo: Cường độ trường chuẩn
Ro: Khoảng cách chuẩn
dBd: Tăng ích ăng ten so với lưỡng cực /2
dBi: Tăng ích ăng ten so với bộ bức xạ đẳng hướng
D-M0, D-M1, D-M2, D-M2’, A-M3: Tên các tín hiệu được xác định trong phụ lục B.2.
1.5. Chữ viết tắt
BS Trạm gốc Base Station
CRC Mã dư theo chu kỳ Cyclic Redundancy Code
dBc Decibel tương đối so với công suất sóng mang Decibels Ralative to the Carrier Power
emf Sức điện động Electromotive Force
erp Công suất bức xạ hiệu dụng Effective Radiated Power
FEC Sửa lỗi trước Forward Error Correction
FFSK Khoá dịch tần nhanh Fast Frequency Shift Key F
SK Khoá dịch tần Frequency Shift Key
GMSK Khoá dịch tối thiểu Gauss Gaussian Minimum Shift Keying
IF Trung tần Intermediate Frequency
LSB Bit có trọng số thấp nhất Least Significant Bit
MSB Bit có trọng số cao nhất Most Significant Bit
MSK Khoá dịch tối thiểu Minimum Shift Keying
PLL Vòng khoá pha Phase Locked Loop
PSK Khoá dịch pha Phase Shift Keying
PSTN Mạng điện thoại chuyển mạch công cộng Public Switched Telephone Network
RF Tần số vô tuyến Radio Frequency
rms Căn trung bình bình phương Root mean square
Rx Máy thu Receiver
sr Dải tần của các kênh cài đặt sẵn Switching Range
Tx Máy phát Transmitter
2. QUY ĐỊNH KỸ THUẬT
2.1. Môi trường hoạt động
Các yêu cầu kỹ thuật của Quy chuẩn này áp dụng ở các điều kiện môi trường hoạt động của thiết bị, những điều kiện này được xác định theo loại môi trường của thiết bị. Thiết bị phải tuân theo tất cả các yêu cầu kỹ thuật của Quy chuẩn này khi hoạt động trong phạm vi giới hạn của điều kiện môi trường hoạt động.
2.2. Các yêu cầu đối với máy phát
2.2.1. Sai số tần số
Phép đo này được thực hiện nếu thiết bị có khả năng phát sóng mang không điều chế. Mặt khác, công suất kênh lân cận cũng phải được đo ở các điều kiện đo kiểm tới hạn và các giới hạn trong 2.2.4.2 phải được thoả mãn.
2.2.1.1. Định nghĩa
Sai số tần số của máy phát là hiệu giữa tần số sóng mang không điều chế đo được và tần số danh định của máy phát.
2.2.1.2. Giới hạn
Sai số tần số không được vượt quá các giá trị trong Bảng 1, ở các điều kiện đo kiểm bình thường và tới hạn, hoặc một điều kiện trung gian.
Bảng 1 – Sai số tần số
|
Khoảng cách kênh (kHz) |
Giới hạn sai số tần số (kHz) |
||||
|
Thấp hơn 47 MHz |
Từ 47 MHz đến 137 MHz |
Từ 137 MHz đến 300 MHz |
Từ 300 MHz đến 500 MHz |
Từ 500 MHz đến 1000 MHz |
|
|
25 |
±0,60 |
±1,35 |
±2,00 |
±2,00 (Chú thích) |
±2,50 (Chú thích) |
|
12,5 |
±0,60 |
±1,00 |
±1,00 (B) ±1,50 (M) |
±1,00 (B) ±1,50 (M) (Chú thích) |
Không xác định |
|
CHÚ THÍCH: Đối với các máy cầm tay có nguồn tích hợp, những giới hạn này chỉ áp dụng cho dải nhiệt độ tới hạn từ 0oC đến + 30oC. Tuy nhiên ở điều kiện nhiệt độ tới hạn đầy đủ, giới hạn sai số tần số là: o ±2,50 kHz với các tần số nằm giữa 300 MHz và 500 MHz; o ±3,00 kHz với các tần số nằm giữa 500 MHz và 1000 MHz. (B) Trạm gốc (M) Trạm di động |
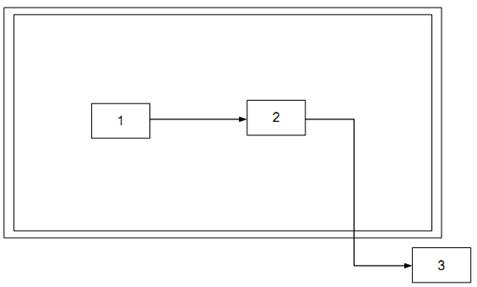
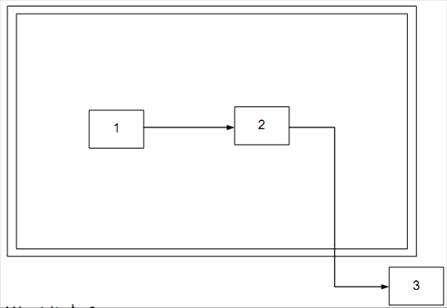
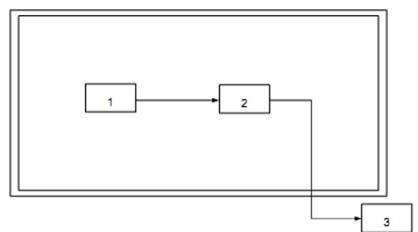
2.2.1.3. Phương pháp đo

Hình 1- Sơ đồ đo
Thiết bị phải được nối với ăng ten giả (mục B.3).
Tần số sóng mang được đo khi không có điều chế. Phép đo phải được thực hiện ở các điều kiện đo kiểm bình thường (3.1.1.1) và các điều kiện đo kiểm tới hạn (3.1.1.2.1 và 3.1.1.2.2 áp dụng đồng thời).
2.2.2. Công suất sóng mang (dẫn)
Nếu thiết bị được thiết kế với các công suất sóng mang khác nhau, công suất danh định của mỗi mức hoặc một dải các mức phải được nhà sản xuất công bố. Người sử dụng phải không thể tác động được vào bộ phận điều khiển công suất.
Các yêu cầu của Quy chuẩn này phải được thoả mãn với tất cả các mức công suất hoạt động của máy phát. Thực tế, chỉ thực hiện phép đo ở mức công suất thấp nhất và cao nhất của máy phát.
2.2.2.1. Định nghĩa
Công suất sóng mang (dẫn) của máy phát là công suất trung bình cấp cho ăng ten giả trong một chu kỳ tần số vô tuyến.
Công suất đầu ra danh định là công suất sóng mang (dẫn) của thiết bị được nhà sản xuất công bố.
2.2.2.2. Giới hạn
Phép đo này áp dụng cho tất cả các thiết bị thuộc phạm vi của Quy chuẩn kỹ thuật quốc gia này.
Công suất sóng mang (dẫn) ở các điều kiện đo xác định (2.2.2.3) và ở các điều kiện đo bình thường phải nằm trong khoảng ±1,5 dB so với công suất sóng mang (dẫn) danh định.
Công suất sóng mang (dẫn) ở các điều kiện đo tới hạn phải nằm trong khoảng +2,0 dB và -3 dB so với công suất đầu ra danh định.
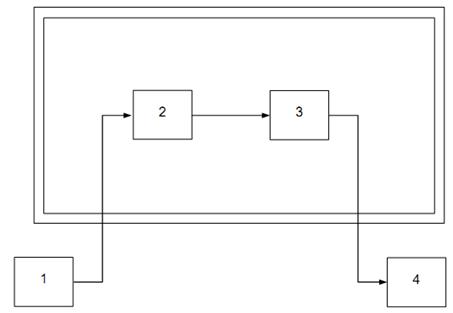
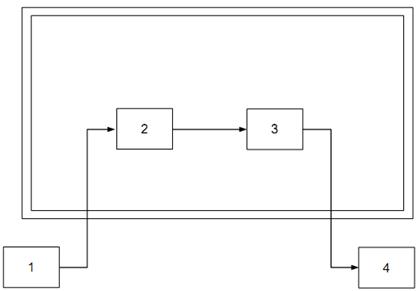
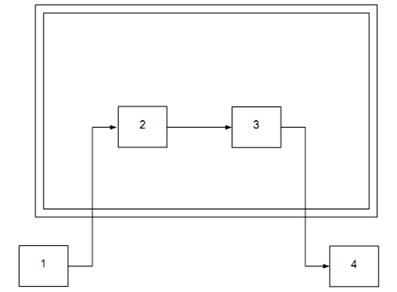
2.2.2.3. Phương pháp đo

Hình 2 – Sơ đồ đo
Khi đo, tốt nhất là không sử dụng điều chế tín hiệu.
Nếu không thực hiện được điều kiện này, phải ghi lại trong các báo cáo đo (mục B.5).
Nối máy phát với một ăng ten giả (mục B.3), đo công suất cấp cho ăng ten giả này.
Thực hiện phép đo ở các điều kiện đo bình thường (3.1.1.1) và các điều kiện đo tới hạn (3.1.1.2.1 và 3.1.1.2.2 áp dụng đồng thời).
2.2.3. Công suất bức xạ hiệu dụng (cường độ trường)
Phép đo này chỉ áp dụng đối với thiết bị không có đầu nối ăng ten ngoài.
Nếu thiết bị được thiết kế hoạt động với các công suất sóng mang khác nhau, công suất danh định của mỗi mức hoặc một dải các mức được nhà sản xuất công bố. Người sử dụng phải không thể tác động được vào bộ phận điều khiển công suất.
Các yêu cầu của Quy chuẩn này phải được thoả mãn với tất cả các mức công suất hoạt động của máy phát. Thực tế chỉ thực hiện phép đo ở mức công suất thấp nhất và cao nhất của máy phát.
2.2.3.1. Định nghĩa
Công suất bức xạ hiệu dụng là công suất bức xạ ở hướng có cường độ trường cực đại với các điều kiện đo xác định.
Công suất bức xạ hiệu dụng danh định là công suất bức xạ hiệu dụng của thiết bị được nhà sản xuất công bố.
2.2.3.2. Giới hạn
Công suất bức xạ hiệu dụng ở các điều kiện đo bình thường phải nằm trong khoảng df so với công suất bức xạ hiệu dụng danh định.
df được xác định theo sai số của thiết bị (1,5 dB) và sai số đo thực tế:
df2 = dm2 + de2
Trong đó:
– dm là độ không đảm bảo đo thực tế;
– de là sai số của thiết bị (1,5 dB);
– df là sai số tổng.
Các giá trị được biểu diễn theo đơn vị tuyến tính.
Ngoài ra, công suất bức xạ hiệu dụng cực đại không được vượt quá giá trị lớn nhất cho phép bởi nhà quản lý.
2.2.3.3. Phương pháp đo
Phép đo chỉ được thực hiện ở các điều kiện đo bình thường. Khi đo, tốt nhất là không sử dụng điều chế tín hiệu.
Nếu không thực hiện được điều kiện này, phải ghi lại trong các báo cáo đo (mục B.5).
Thủ tục đo như sau:
a) Sử dụng một vị trí đo, được chọn theo Phụ lục A, thoả mãn các yêu cầu về dải tần của phép đo này. Đầu tiên, ăng ten đo phải được định hướng theo phân cực đứng, trừ khi có chỉ dẫn khác.
Máy phát cần đo phải được đặt ở độ cao xác định trên một giá đỡ không dẫn điện ở vị trí giống như vị trí sử dụng bình thường được nhà sản xuất công bố. Vị trí này phải được ghi lại trong báo cáo đo.
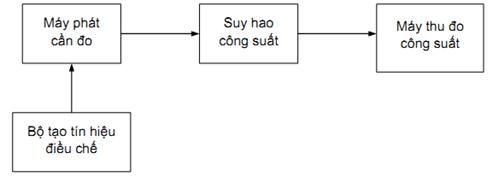
1) Máy phát cần đo
2) Ăng ten đo
3) Máy phân tích phổ hoặc Vôn kế chọn lọc (Máy thu đo)
Hình 3 – Sơ đồ đo
b) Máy phân tích phổ hoặc Vôn kế chọn lọc phải được điều chỉnh tới tần số sóng mang của máy phát. Ăng ten đo được nâng lên hoặc hạ xuống trong toàn bộ dải độ cao xác định cho đến khi thu được mức tín hiệu lớn nhất trên máy phân tích phổ hoặc Vôn kế chọn lọc. Ăng ten đo không cần nâng lên hoặc hạ xuống nếu thực hiện phép đo ở vị trí đo như mục A.1.1 (phòng không phản xạ).
c) Máy phát phải được xoay 3600 quanh trục thẳng đứng cho đến khi thu được tín hiệu cực đại lớn hơn.
d) Ăng ten đo tiếp tục được nâng lên hoặc hạ xuống trong toàn bộ dải độ cao xác định cho đến khi thu được mức tín hiệu lớn nhất. Ghi lại mức này. (Mức cực đại này phải có giá trị thấp hơn giá trị thu được ở các độ cao ngoài các giới hạn xác định).
Ăng ten đo có thể không cần nâng lên hoặc hạ xuống nếu thực hiện phép đo ở vị trí đo như mục A.1.1 (phòng đo không phản xạ).
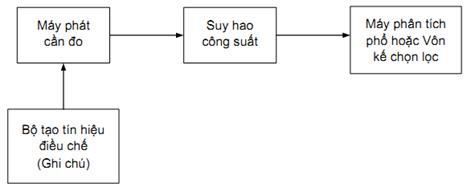
e) Sơ đồ đo như trong Hình 4, ăng ten thay thế (mục A.1.5) được sử dụng thay cho ăng ten máy phát ở cùng vị trí và phân cực đứng. Tần số của bộ tạo tín hiệu phải được điều chỉnh đến tần số sóng mang của máy phát. Nếu cần thiết, ăng ten đo phải được nâng lên hoặc hạ xuống để đảm bảo rằng vẫn thu được tín hiệu cực đại.
Ăng ten đo không cần nâng lên hoặc hạ xuống nếu thực hiện phép đo ở vị trí đo như mục A.1.1 (phòng đo không phản xạ).
Mức tín hiệu vào ăng ten thay thế được điều chỉnh cho đến khi mức công suất thu được ở máy thu đo bằng mức công suất tương ứng đo được khi có máy phát.
Công suất bức xạ sóng mang cực đại bằng công suất cung cấp bởi bộ tạo tín hiệu và có hiệu chỉnh theo tăng ích của ăng ten thay thế và suy hao cáp nối giữa bộ tạo tín hiệu và ăng ten thay thế.
f) Lặp lại các bước từ b) đến e) với ăng ten đo và ăng ten thay thế theo phân cực ngang.
Số đo công suất bức xạ hiệu dụng là giá trị lớn hơn trong hai giá trị ghi được ở đầu vào ăng ten thay thế có hiệu chỉnh theo tăng ích của ăng ten nếu cần.
1) Bộ tạo tín hiệu
2) Ăng ten thay thế
3) Ăng ten đo
4) Máy phân tích phổ hoặc Vôn kế chọn lọc (Máy thu đo)
Hình 4 – Sơ đồ đo
2.2.4. Công suất kênh lân cận
2.2.4.1. Định nghĩa
Công suất kênh lân cận là một phần của tổng công suất đầu ra máy phát với các điều kiện điều chế xác định, nằm trong các băng thông xác định có tần số trung tâm là tần số danh định của hai kênh lân cận. Công suất này là tổng công suất trung bình sinh ra do điều chế, tạp âm và nhiễu của máy phát.
2.2.4.2. Giới hạn
Với các khoảng cách kênh 25 kHz, công suất kênh lân cận không được lớn hơn -70,0 dB so với công suất sóng mang (dẫn) của máy phát mà không nhất thiết phải thấp hơn 0,2 µW (-37 dBm).
Với khoảng cách kênh 12,5 kHz, công suất kênh lân cận không được lớn hơn -60,0 dB so với công suất sóng mang (dẫn) của máy phát mà không nhất thiết phải thấp hơn 0,2 µW (-37 dBm).
2.2.4.3. Phương pháp đo
Hình 5 – Sơ đồ đo
Công suất kênh lân cận có thể được đo bằng máy thu đo công suất (trong phần này ký hiệu là “máy thu”) tuân theo Phụ lục B.
Máy phát phải làm việc tại công suất sóng mang được xác định trong 2.2.2 ở các điều kiện đo bình thường (3.1.1.1). Đầu ra máy phát được nối với đầu vào của “máy thu” bằng thiết bị nối có trở kháng đối với máy phát là 50Ω và có mức phù hợp ở “đầu vào máy thu”.
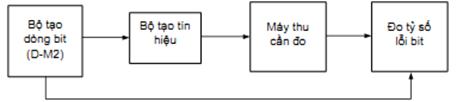
Với máy phát không điều chế, điều chỉnh “máy thu” sao cho thu được đáp ứng lớn nhất. Đây là điểm đáp ứng 0 dB. Ghi lại việc thiết lập bộ suy hao “máy thu” và chỉ số của máy đo. Nếu phải điều chế sóng mang, khi đó thực hiện phép đo bằng cách điều chế máy phát với các tín hiệu đo bình thường D-M2 hoặc D-M4 (theo mục B.2) và ghi lại trong báo cáo đo.
Tần số của “máy thu” phải được điều chỉnh cao hơn sóng mang sao cho đáp ứng -6 dB của “máy thu” mà gần nhất với tần số sóng mang của máy phát có vị trí dịch chuyển so với tần số sóng mang như chỉ ra trong Bảng 2.
Bảng 2 – Dịch tần số
|
Khoảng cách kênh (kHz) |
Băng thông cần thiết (kHz) |
Dịch so với điểm -6 dB (kHz) |
|
12,5 |
8,5 |
8,25 |
|
25 |
16 |
17 |
Máy phát phải được điều chế bằng tín hiệu đo bình thường D-M2 hoặc D-M4, mục B.2.
Điều chỉnh bộ suy hao của “máy thu” để đạt được cùng mức (hoặc một tỷ lệ xác định) ở máy đo trong bước b).
Tỷ số công suất kênh lân cận so với công suất sóng mang là độ chênh lệch giữa các giá trị thiết lập bộ suy hao như trong các bước b) và e), và được hiệu chỉnh theo chỉ số của máy đo.
Với mỗi kênh lân cận, ghi lại công suất của kênh lân cận đó.
Lặp lại phép đo với tần số “máy thu” được điều chỉnh thấp hơn sóng mang sao cho đáp ứng -6 dB của “máy thu” mà gần nhất với tần số sóng mang của máy phát có vị trí dịch chuyển so với tần số sóng mang như chỉ ra trong Bảng 2.
Công suất kênh lân cận của thiết bị cần đo là giá trị cao hơn trong hai giá trị được ghi lại ở bước f) đối với hai kênh lân cận trên và dưới của kênh đang đo.
Nếu không thể thực hiện đo sai số tần số mà không sử dụng điều chế (xem 2.2.1), phải lặp lại phép đo này ở các điều kiện đo tới hạn (3.1.1.2.1 và 3.1.1.2.2 áp dụng đồng thời).
2.2.5. Phát xạ giả
2.2.5.1. Định nghĩa
Phát xạ giả là các phát xạ tại các tần số không phải là tần số sóng mang và nằm ngoài các dải biên với điều chế bình thường.
Mức phát xạ giả được đo bằng các cách sau:
– Đo mức công suất ở các tải xác định (phát xạ giả dẫn); và
– Đo công suất bức xạ hiệu dụng của các bức xạ do vỏ và cấu trúc của thiết bị (bức xạ vỏ máy); hoặc
– Đo công suất bức xạ hiệu dụng của các bức xạ do vỏ máy và ăng ten liền, trong trường hợp thiết bị cầm tay có ăng ten liền và không có đầu nối RF bên ngoài.
2.2.5.2. Giới hạn
Công suất của phát xạ giả không được vượt quá các giá trị trong Bảng 3 và 4.
Bảng 3 – Các phát xạ dẫn
|
Dải tần |
Trạng thái phát |
Trạng thái chờ |
|
9 kHz đến 1 GHz |
0,25 µW (-36 dBm) |
2,0 nW (-57 dBm) |
|
Trên 1 GHz đến 4 GHz, hoặc từ 1 GHz đến 12,75 GHz |
1,00 µW (-30 dBm) |
20 nW (-47 dBm) |
Bảng 4 – Các phát xạ bức xạ
|
Dải tần |
Trạng thái phát |
Trạng thái chờ |
|
30 MHz đến 1 GHz |
0,25 µW (-36 dBm) |
2,0 nW (-57 dBm) |
|
Trên 1 GHz đến 4 GHz |
1,00 µW (-30 dBm) |
20 nW (-47 dBm) |
Khi đo bức xạ của các máy cầm tay, áp dụng các điều kiện sau:
– Với thiết bị có ăng ten liền bên trong, ăng ten bình thường vẫn được kết nối;
– Với thiết bị có ổ cắm ăng ten ngoài, khi đo kiểm phải nối tải giả với ổ cắm này.
2.2.5.3. Phương pháp đo
2.2.5.3.1. Đo mức công suất
CHÚ THÍCH: Chỉ sử dụng nếu không thể thực hiện được phép đo với máy phát không điều chế.
Hình 6 – Sơ đồ đo
Phương pháp đo này chỉ áp dụng đối với thiết bị có đầu nối ăng ten ngoài.
Đo các phát xạ giả theo mức công suất của bất kỳ tín hiệu rời rạc nào (không kể tín hiệu mong muốn) trên tải 50Ω. Việc này có thể thực hiện được bằng cách nối đầu ra máy phát thông qua bộ suy hao tới máy phân tích phổ (mục B.7) hoặc Vôn kế chọn lọc, hoặc bằng cách kiểm tra các mức tương đối của các tín hiệu tạp cấp cho ăng ten giả (mục B.3).
Phép đo phải được thực hiện với máy phát không sử dụng điều chế nếu có thể. Nếu không thể thực hiện được điều này, máy phát phải được điều chế bằng tín hiệu đo bình thường D-M2 hoặc D-M4 (mục B.2). Việc điều chế phải được thực hiện liên tục trong quá trình đo.
Băng thông phân giải của thiết bị đo phải là băng thông nhỏ nhất khả dụng mà lớn hơn độ rộng phổ của các thành phần tạp đang được đo. Điều này phải được xem xét để đạt được khi băng thông cao nhất tiếp theo gây ra sự giảm biên độ ít hơn 1 dB.
Các điều kiện trong các phép đo liên quan phải được ghi lại trong báo cáo đo.
Phải thực hiện các phép đo với thiết bị hoạt động trên các tần số không vượt quá 470 MHz, trong dải tần 9 kHz – 4 GHz, và với thiết bị hoạt động trên các tần số lớn hơn 470 MHz, trong dải tần 4 GHz – 12,75 GHz, ngoại trừ kênh hoạt động của máy phát và các kênh lân cận.
Lặp lại phép đo với máy phát ở trạng thái “chờ”.
2.2.5.3.2. Đo công suất bức xạ hiệu dụng
Thủ tục đo như sau:
Tại vị trí đo (thoả mãn các yêu cầu Phụ lục A), mẫu thử được đặt ở độ cao xác định trên giá đỡ.
Máy phát phải hoạt động với công suất sóng mang như xác định trong 2.2.2 để cấp cho:
– Ăng ten giả (mục B.3) đối với thiết bị có đầu nối ăng ten ngoài (xem 2.2.5.1); hoặc
– Ăng ten liền (xem 2.2.5.1).
1) Máy phát cần đo
2) Ăng ten đo
3) Máy phân tích phổ hoặc Vôn kế chọn lọc (Máy thu đo)
Hình 7 – Sơ đồ đo
Nếu có thể, phép đo phải thực hiện với máy phát không sử dụng điều chế. Nếu không thể thực hiện được điều này thì phải điều chế bằng tín hiệu đo kiểm bình thường D-M2 hoặc D-M4 (mục B.2). Nếu có thể, phải điều chế liên tục trong suốt thời gian đo.
Băng thông phân giải của thiết bị đo là băng thông nhỏ nhất mà vẫn lớn hơn độ rộng phổ của thành phần tạp đang được đo. Điều này cần phải quan tâm để đạt được khi độ rộng băng cực đại kế tiếp làm cho biên độ tăng ít hơn 1 dB.
Điều kiện trong các phép đo liên quan phải được ghi lại trong báo cáo đo.
Dò tìm bức xạ của các thành phần tạp bằng máy thu và ăng ten đo trong toàn bộ dải tần 30 MHz – 4 GHz ngoại trừ kênh hoạt động của máy phát và các kênh lân cận.
Tại mỗi tần số dò thấy thành phần tạp, xoay mẫu thử để thu được đáp ứng cực đại và công suất bức xạ hiệu dụng của thành phần tạp được xác định bằng phép đo thay thế, sơ đồ đo như trong Hình 8;
Ghi lại giá trị công suất bức xạ hiệu dụng của thành phần tạp đó. Lặp lại phép đo với ăng ten đo ở mặt phẳng phân cực trực giao; Lặp lại phép đo với máy phát ở trạng thái “chờ”;
1) Bộ tạo tín hiệu
2) Ăng ten thay thế
3) Ăng ten đo
4) Máy phân tích phổ hoặc Vôn kế chọn lọc (Máy thu đo)
Hình 8 – Sơ đồ đo
2.2.6. Suy hao xuyên điều chế
2.2.6.1. Định nghĩa
Trong Quy chuẩn này, suy hao xuyên điều chế là số đo khả năng hạn chế việc tạo ra các tín hiệu ở các phần tử phi tuyến của máy phát khi có tín hiệu sóng mang và nhiễu đi vào máy phát qua ăng ten.
2.2.6.2. Giới hạn
Yêu cầu này chỉ áp dụng đối với các máy phát được sử dụng trong các trạm gốc.
Có hai loại suy hao xuyên điều chế của máy phát, thiết bị phải thoả mãn một trong các yêu cầu:
– Tỷ số suy hao xuyên điều chế nhỏ nhất phải là 40,0 dB đối với bất kỳ sản phẩm xuyên điều chế nào;
– Với thiết bị trạm gốc được sử dụng trong các điều kiện dịch vụ đặc biệt (ở các vị trí có nhiều máy phát hoạt động), tỷ số suy hao xuyên điều chế nhỏ nhất phải là 70,0 dB đối với bất kỳ sản phẩm xuyên điều chế nào.
2.2.6.3. Phương pháp đo
Sơ đồ đo được chỉ trong Hình 9.
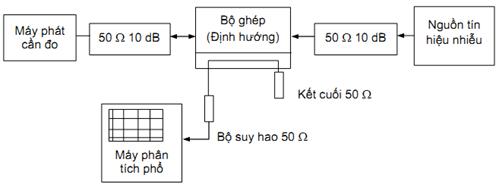
Hình 9 – Sơ đồ đo
Nối máy phát với bộ suy hao công suất 50 Ω 10 dB và với máy phân tích phổ qua bộ ghép (định hướng). Có thể cần bộ suy hao phụ giữa bộ ghép định hướng và máy phân tích phổ để tránh quá tải.
Để giảm ảnh hưởng của sai số ghép không thích ứng, phải ghép bộ suy hao công suất 10 dB với máy phát cần đo bằng dây nối ngắn nhất có thể.
Nguồn tín hiệu nhiễu có thể là một máy phát cấp cùng một công suất và có kiểu tương tự như máy phát cần đo hoặc một bộ tạo tín hiệu và bộ khuếch đại công suất tuyến tính có khả năng cấp công suất đầu ra giống như máy phát cần đo.
Bộ ghép (định hướng) phải có suy hao ghép thấp hơn 1 dB. Nếu được sử dụng, bộ ghép định hướng phải có băng thông đủ lớn và phải có hệ số định hướng thấp nhất là 20 dB.
Máy phát cần đo và và nguồn tín hiệu đo phải được phân cách về mặt vật lý sao cho phép đo không bị ảnh hưởng bởi bức xạ trực tiếp.
Máy phát cần đo phải không được sử dụng điều chế và máy phân tích phổ được điều chỉnh để có chỉ thị cực đại với độ rộng quét tần số là 500 kHz.
Nguồn tín hiệu nhiễu phải không được điều chế và có tần số cao hơn tần số máy phát cần đo từ 50 kHz đến 100 kHz.
Chọn tần số sao cho các thành phần xuyên điều chế được đo không trùng với các thành phần tạp khác. Điều chỉnh công suất đầu ra của nguồn tín hiệu nhiễu tới mức công suất sóng mang của máy phát cần đo bằng cách sử dụng máy đo công suất.
Đo thành phần xuyên điều chế bằng cách quan sát trực tiếp trên máy phân tích phổ tỷ số của thành phần xuyên điều chế thứ ba lớn nhất so với sóng mang. Ghi lại giá trị này.
Lặp lại phép đo này với nguồn tín hiệu nhiễu thử ở một tần số thấp hơn tần số của máy phát cần đo từ 50 kHz đến 100 kHz.
Suy hao xuyên điều chế của máy phát cần đo là giá trị thấp hơn trong hai giá trị được ghi ở trên.
2.2.7. Thời gian kích hoạt máy phát
2.2.7.1. Định nghĩa
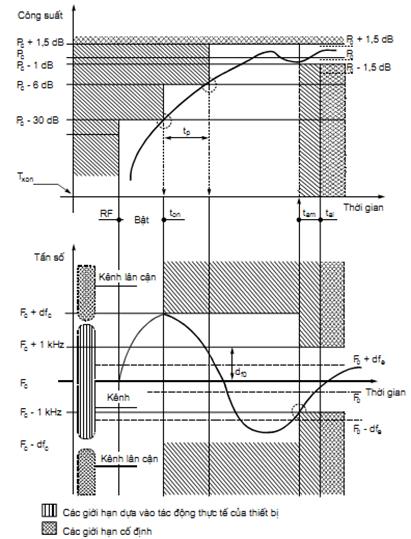
Thời gian kích hoạt máy phát (ta) là khoảng thời gian giữa thời điểm “bật máy phát” (Txon, xem 2.2.9.1) và thời điểm xảy ra sau trong hai thời điểm sau đây (2.2.9, Hình 10 và 11):
– Thời điểm khi công suất đầu ra máy phát đạt đến mức -1 dB hoặc +1,5 dB so với công suất trạng thái ổn định (Pc) và duy trì ở mức trong khoảng từ -1 dB đến +1,5 dB so với Pc, như quan sát trên thiết bị đo hoặc đồ thị công suất/thời gian; hoặc
– Thời điểm sau khi tần số sóng mang duy trì trong khoảng 1 kHz so với tần số trạng thái ổn định Fc, như quan sát trên thiết bị đo hoặc đồ thị tần số/thời gian.
Giá trị đo được của ta là tam, giới hạn là tal.
2.2.7.2. Giới hạn
Thời gian kích hoạt máy phát không được vượt quá 25 ms (tam tal).
2.2.7.3. Phương pháp đo
Sơ đồ đo xem 2.2.9.3.2, Hình 13. Thủ tục đo như sau:
Nối máy phát với bộ tách sóng RF và bộ phân biệt đo thông qua tải thích ứng. Suy hao của tải được chọn sao cho đầu vào của bộ phân biệt đo được bảo vệ chống quá tải và bộ khuếch đại hạn chế của bộ phân biệt đo hoạt động đúng trong dải giới hạn ngay sau khi công suất sóng mang của máy phát (trước khi suy giảm) vượt quá 1 mW. Máy hiện sóng có nhớ 2 đường (hoặc máy ghi quá độ) ghi lại biên độ quá độ từ bộ tách sóng theo thang logarit và ghi lại tần số quá độ từ bộ phân biệt đo.
Có thể sử dụng một công tắc để đảm bảo rằng thời điểm quét của máy hiện sóng bắt đầu ngay sau khi “bật máy phát”. Sơ đồ đo như trong Hình 13, 2.2.9.3.2.
Máy phân tích phổ và máy hiện sóng có nhớ/bộ phân biệt cũng có thể được sử dụng.
Các đường của máy hiện sóng được hiệu chuẩn theo công suất và tần số (trục y) và theo thời gian (trục x), sử dụng bộ tạo tín hiệu.
Thời gian kích hoạt máy phát được đo bằng cách đọc trực tiếp trên máy hiện sóng trong khi máy phát không được điều chế là tốt nhất.
2.2.8. Thời gian khử hoạt máy phát
2.2.8.1. Định nghĩa
Thời gian khử hoạt máy phát (tr) là khoảng thời gian giữa thời điểm “tắt máy phát” (Txoff, xem 2.2.9.1) và thời điểm khi công suất đầu ra máy phát giảm xuống thấp hơn công suất trạng thái ổn định (Pc) 50 dB và duy trì thấp hơn mức này như quan sát trên thiết bị đo hoặc đồ thị công suất/thời gian (2.2.9, Hình 12).
Giá trị đo được của tr là trm, giới hạn là trl.
2.2.8.2. Giới hạn
Thời gian khử hoạt máy phát không được vượt quá 20 ms (trm ≤ trl).
2.2.8.3. Phương pháp đo
Sơ đồ đo xem 2.2.9.3.2, Hình 13. Thủ tục đo như sau:
Nối máy phát với bộ tách sóng RF và bộ phân biệt đo thông qua bộ suy hao công suất thích ứng. Suy hao được chọn sao cho đầu vào của bộ phân biệt đo được bảo
vệ chống quá tải và bộ khuếch đại hạn chế của bộ phân biệt đo hoạt động đúng trong dải giới hạn với điều kiện công suất sóng mang của máy phát (trước suy hao) vượt quá 1 mW. Máy hiện sóng có nhớ 2 tia (hoặc máy ghi quá độ) ghi lại biên độ quá độ từ bộ tách sóng theo thang logarit và ghi lại tần số quá độ từ bộ phân biệt.
Có thể sử dụng một công tắc để đảm bảo rằng thời điểm quét của máy hiện sóng bắt đầu ngay sau khi “tắt máy phát”. Sơ đồ đo như trong Hình 13, 2.2.9.3.2.
Máy phân tích phổ và máy hiện sóng có nhớ/bộ phân biệt cũng có thể được sử dụng.
Các đường của máy hiện sóng được hiệu chuẩn theo công suất và tần số (trục y) và theo thời gian (trục x) bằng cách thay thế máy phát và tải bằng bộ tạo tín hiệu.
Thời gian khử hoạt máy phát được đo bằng cách đọc trực tiếp trên máy hiện sóng trong khi máy phát không sử dụng điều chế là tốt nhất.
2.2.9. Quá độ của máy phát
2.2.9.1 Định nghĩa
Quá độ của máy phát là sự phụ thuộc theo thời gian của tần số máy phát, công suất và phổ khi bật và tắt công suất RF đầu ra.
Công suất, tần số, dung sai tần số và thời gian quá độ được quy định như sau: P0: Công suất danh định;
Pc: Công suất trạng thái ổn định;
Pa: Công suất quá độ của kênh lân cận. Đó là công suất quá độ trong các kênh lân cận do bật và tắt máy phát (theo 2.2.9.3.3).
F0: Tần số sóng mang danh định;
Fc: Tần số sóng mang ở trạng thái ổn định;
df: Lệch tần số (so với Fc) hoặc sai số tần số (tuyệt đối ) (theo 2.2.1.1) của máy phát;
dfe: Giới hạn sai số tần số (df) ở trạng thái ổn định (theo 2.2.5.2);
df0: Giới hạn độ lệch tần số (df) bằng 1 kHz. Nếu không thể tắt điều chế máy phát thì phải cộng thêm một nửa khoảng cách kênh;
dfc: Giới hạn độ lệch tần số (df) quá độ, bằng một nửa khoảng cách kênh; trong khi độ lệch tần số nhỏ hơn dfc, tần số sóng mang vẫn nằm trong phạm vi của kênh ấn định. Nếu không thể thực hiện tắt điều chế máy phát thì cộng thêm một nửa khoảng cách kênh;
Txon: Thời điểm bật máy phát;
ton: Thời điểm khi công suất mang (đo được ở đầu ra máy phát) vượt quá Pc – 30 dB;
tp: Khoảng thời gian bắt đầu từ thời điểm ton và kết thúc khi công suất đạt mức Pc – 6 dB;
ta: Thời gian kích hoạt máy phát như định nghĩa trong 2.2.7;
tam: Giá trị đo được của ta;
tal: Giới hạn của tam như trong 2.2.7.2; Txoff: Thời điểm tắt máy phát;
Toff: Thời điểm khi công suất mang xuống thấp hơn Pc – 30 dB;
td: Khoảng thời gian bắt đầu khi công suất xuống thấp hơn Pc – 6 dB và kết thúc ở thời điểm toff.
tr: Thời gian khử hoạt máy phát như định nghĩa trong mục 2.2.8 (sau thời gian khử hoạt này, công suất giữ ở mức thấp hơn Pc – 50 dB);
trm: Giá trị đo được của tr;
trl: Giới hạn trm như trong 2.2.8.2.
Nếu sử dụng bộ tổng hợp và/hoặc hệ thống mạch vòng khoá pha (PLL) để xác định tần số máy phát thì máy phát phải bị tắt khi mất đồng bộ hoặc, trong trường hợp PLL, khi hệ thống mạch vòng không khóa được.
2.2.9.2. Giới hạn
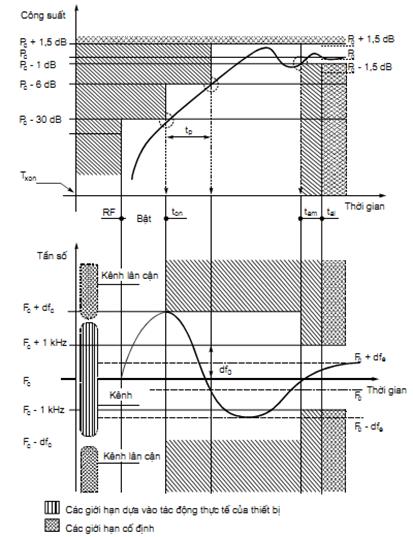
2.2.9.2.1. Miền thời gian của công suất và tần số
Hình 10, 11 và 12 mô tả các thời điểm, tần số và công suất như định nghĩa trong 2.2.7.1, 2.2.8.1 và 2.2.9.1.
![]() Hình 10 – Thời gian kích hoạt máy phát theo mục 2.2.7.1 và quá độ khi bật máy
Hình 10 – Thời gian kích hoạt máy phát theo mục 2.2.7.1 và quá độ khi bật máy
![]() Hình 11 – Thời gian kích hoạt máy phát theo mục 2.2.7.1 và quá độ khi bật máy
Hình 11 – Thời gian kích hoạt máy phát theo mục 2.2.7.1 và quá độ khi bật máy
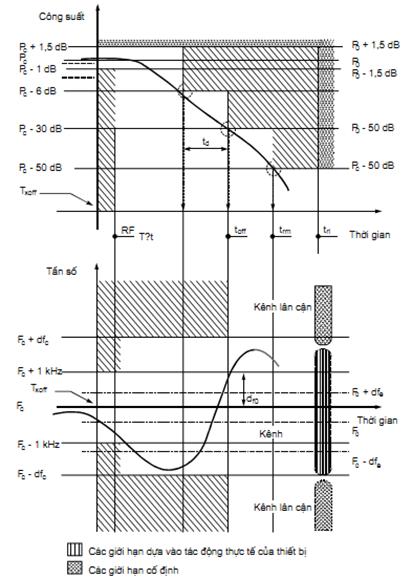
Hình 12 – Thời gian khử hoạt máy phát theo mục 2.2.8.1 và quá độ khi tắt máy
Các đồ thị công suất sóng mang (dẫn) và tần số sóng mang theo thời gian (gồm một số điểm quá độ phù hợp) phải được ghi trong báo cáo đo.
Tại thời điểm bất kỳ khi công suất sóng mang lớn hơn Pc – 30 dB, tần số sóng mang phải duy trì trong phạm vi nửa khoảng cách kênh (dfc) so với tần số sóng mang ở trạng thái ổn định (Fc).
![]() Độ dốc của các đồ thị “công suất theo thời gian” ứng với cả thời gian kích hoạt và khử hoạt, phải thoả mãn:
Độ dốc của các đồ thị “công suất theo thời gian” ứng với cả thời gian kích hoạt và khử hoạt, phải thoả mãn:
tp ≥ 0,20 ms và td ≥ 0,20 ms, đối với cả thời gian kích hoạt và khử hoạt;
Trong khoảng giữa điểm Pc – 30 dB và điểm Pc – 6 dB (đối với cả thời gian kích hoạt và khử hoạt), độ dốc phải không được thay đổi.
2.2.9.2.2. Công suất quá độ ở kênh lân cận
Đối với các khoảng cách kênh 25 kHz, công suất quá độ trong các kênh lân cận không được lớn hơn -60 dB so với công suất sóng mang (dẫn) của máy phát (tính theo decibel tương đối so với công suất sóng mang (dBc)) mà không nhất thiết phải thấp hơn 2 µW (-27,0 dBm);
Đối với khoảng cách kênh 12,5 kHz, công suất quá độ trong các kênh lân cận không được lớn hơn -50 dB so với công suất sóng mang (dẫn) của máy phát (theo dBc) mà không nhất thiết phải thấp hơn 2 µW (-27,0 dBm).
2.2.9.3. Phương pháp đo
Các thời điểm quá độ (các trường hợp chuyển mạch bật và tắt) và các độ lệch tần số trong những thời điểm này có thể được đo bằng máy phân tích phổ và bộ phân biệt đo mà thoả mãn các yêu cầu được nêu trong 2.2.9.3.2.
Công suất, làm giảm hoạt động ở các kênh lân cận, có thể được đo bằng cách sử dụng máy đo công suất quá độ phù hợp mà thoả mãn các yêu cầu của 2.2.9.3.4.
2.2.9.3.1. Đo miền thời gian của công suất và tần số
Nếu có thể, phải thực hiện phép đo với máy phát không sử dụng điều chế. Nếu không, phép đo được thực hiện với máy phát có sử dụng điều chế và phải ghi lại điều này trong báo cáo đo.
Nối máy phát theo sơ đồ như Hình 13.
Kiểm tra việc hiệu chuẩn thiết bị đo. Đầu ra máy phát được nối với đầu vào máy phân tích phổ và bộ phân biệt đo thông qua các bộ suy hao công suất và bộ chia công suất.
Giá trị của bộ suy hao công suất được lựa chọn sao cho đầu vào của thiết bị đo được bảo vệ chống quá tải và bộ khuếch đại hạn chế của bộ phân biệt đo hoạt động chính xác trong dải giới hạn khi đạt được các điều kiện công suất trong 2.2.9.1.
Máy phân tích phổ được thiết lập để đo và hiển thị công suất theo thời gian (“chế độ zero span”).
Hiệu chuẩn bộ phân biệt đo. Điều này được thực hiện bằng cách cấp các điện áp RF từ bộ tạo tín hiệu với các độ lệch tần số xác định so với tần số danh định của máy phát.
Sử dụng thiết bị thích hợp để tạo ra xung kích cho thiết bị đo khi bật và tắt máy phát. Có thể giám sát việc bật và tắt công suất RF.
Điện áp ở đầu ra bộ phân biệt đo phải được ghi lại theo hàm thời gian tương ứng với mức công suất trên bộ nhớ hoặc bộ ghi quá độ. Điện áp này là số đo độ lệch tần số. Các khoảng thời gian trong quá độ tần số có thể được đo bằng cách sử dụng gốc thời gian của thiết bị nhớ. Đầu ra của bộ phân biệt đo chỉ có hiệu lực sau ton và trước toff.
2.2.9.3.2. Sơ đồ đo và các đặc tính của bộ phân biệt đo
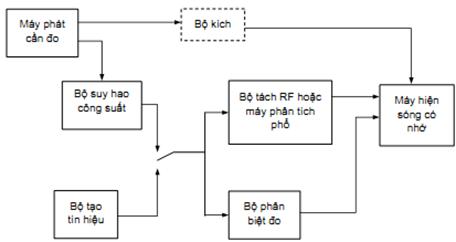
Hình 13 – Sơ đồ đo quá độ công suất và tần số của máy phát trong thời gian kích hoạt và khử hoạt máy phát
Bộ phân biệt đo có thể gồm một bộ trộn và một bộ dao động nội (tạo tần số phụ) để biến đổi tần số máy phát đo được thành tần số cấp cho bộ khuếch đại hạn chế (băng rộng) và bộ phân biệt băng rộng kết hợp:
– Bộ phân biệt đo phải đủ nhạy để đo các tín hiệu vào giảm tới Pc – 30 dB;
– Bộ phân biệt đo phải đủ nhanh để hiển thị các độ lệch tần số (khoảng 100 kHz/100 ms);
Đầu ra bộ phân biệt đo phải được ghép điện một chiều.
2.2.9.3.3. Đo công suất quá độ kênh lân cận
Máy phát cần đo được nối với “thiết bị đo công suất quá độ kênh lân cận” thông qua bộ suy hao công suất như mô tả trong 2.2.9.3.4 để có mức vào phù hợp (giữa 0 dBm và -10 dBm khi công suất máy phát là Pc).
Nếu có thể được phải thực hiện phép đo với máy phát không sử dụng điều chế. Nếu không, phép đo được thực hiện với máy phát có sử dụng điều chế và phải ghi lại điều này trong báo cáo đo.
Thủ tục đo như sau:
Máy phát phải có mức công suất sóng mang danh định cực đại, ở các điều kiện đo kiểm bình thường (3.1.1.1);
Điều chỉnh “máy đo công suất quá độ” để thu được đáp ứng cực đại;
Đây là mức chuẩn 0 dBc; Sau đó tắt máy phát.
Điều chỉnh “máy đo công suất quá độ” khỏi tần số sóng mang để đáp ứng -6 dB của nó mà gần nhất với tần số sóng mang của máy phát được dịch chuyển so với tần số sóng mang như trong Bảng 5 ;
Bảng 5 – Dịch chuyển tần số
|
Khoảng cách kênh (kHz) |
Dịch chuyển (kHz) |
|
12,5 |
8,25 |
|
25 |
17 |
Bật máy phát;
Sử dụng máy phân tích phổ để ghi lại đường bao của công suất quá độ theo thời gian (thời gian khoảng 50 ms). Công suất đường bao đỉnh quá độ được tính theo dBc;
Tắt máy phát;
Sử dụng máy phân tích phổ để ghi lại đường bao của công suất quá độ theo thời gian (thời khoảng 50 ms). Công suất đường bao đỉnh quá độ được tính theo dBc;
Lặp lại các bước năm lần và ghi lại đáp ứng lớn nhất trong các điều kiện “bật” và “tắt”;
Lặp lại các bước với “thiết bị đo công suất quá độ” được điều chỉnh tới biên khác của sóng mang;
Công suất quá độ kênh lân cận trong các thời gian kích hoạt và khử hoạt là giá trị cao nhất trong các giá trị được ghi ở trên). Ghi lại giá trị này.
2.2.9.3.4. Các đặc tính của máy đo công suất quá độ kênh lân cận
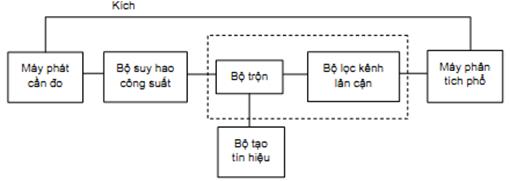
Hình 14 – Sơ đồ đo thiết bị đo công suất quá độ kênh lân cận
Yêu cầu đối với thiết bị đo công suất quá độ kênh lân cận như sau:
Bộ trộn: Bộ trộn điốt cân bằng 50Ω; với mức độ dao động nội phù hợp, ví dụ +7 dB; Bộ lọc kênh lân cận: thích ứng 50 Ω;
Máy phân tích phổ: dải thông 100 kHz, tách sóng đỉnh hoặc đo công suất/thời gian.
2.3. Các yêu cầu đối với máy thu
2.3.1. Độ nhạy (số liệu hoặc bản tin)
2.3.1.1. Định nghĩa
Độ nhạy khả dụng cực đại (số liệu hay bản tin, dẫn) là mức tín hiệu nhỏ nhất (emf) của sóng mang ở đầu vào máy thu mà sau khi giải điều chế nhận được tín hiệu số với một tỷ số lỗi bit là 10-2 hoặc một tỷ lệ bản tin đúng là 80%. Tín hiệu sóng mang này phải có tần số là tần số danh định của máy thu và được điều chế bằng tín hiệu đo kiểm bình thường (mục B.2).
2.3.1.2. Giới hạn
Độ nhạy khả dụng cực đại (emf):
– Ở các điều kiện đo bình thường không được vượt quá: +3,0 dBV và
– Ở các điều kiện đo tới hạn không được vượt quá: +9,0 dBV.
2.3.1.3. Phương pháp đo
2.3.1.3.1. Phương pháp đo với các dòng bit liên tục
Hình 15 – Sơ đồ đo
Thủ tục đo như sau:
Đưa một tín hiệu có tần số bằng tần số danh định của máy thu, được điều chế bằng tín hiệu đo kiểm bình thường D-M2 (mục B.2) tới đầu vào máy thu;
Mẫu bit của tín hiệu điều chế được so sánh với mẫu bit thu được ở máy thu sau khi giải điều chế (xem thêm mục B.4);
Điều chỉnh sức điện động của tín hiệu đầu vào máy thu cho đến khi tỷ số lỗi bit là 10-2 hoặc tốt hơn (khi giá trị 10-2 không thể đạt được chính xác, phải tính đến giá trị của độ không đảm bảo đo).
Độ nhạy khả dụng cực đại là sức điện động của tín hiệu đầu vào máy thu. Ghi lại giá trị này. Lặp lại phép đo ở các điều kiện đo kiểm tới hạn (3.1.1.2.1 và 3.1.1.2.2 áp dụng đồng thời).
2.3.1.3.2. Phương pháp đo với các bản tin
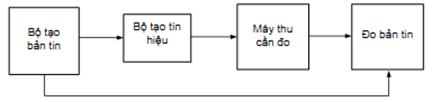
Hình 16 – Sơ đồ đo
Thủ tục đo như sau:
– Đưa một tín hiệu có tần số bằng tần số danh định của máy thu, được điều chế với các tín hiệu đo kiểm bình thường (mục B.2) (phù hợp với chỉ dẫn của nhà sản xuất và được chấp nhận bởi phòng thử nghiệm) tới đầu vào máy thu;
Mức tín hiệu này phải đảm bảo sao cho thu được tỷ số bản tin đúng nhỏ hơn 10%.
– Sau đó phát lại tín hiệu đo kiểm bình thường (mục B.2) kể cả khi bản tin thu được là đúng hay không đúng.
Tăng mức tín hiệu vào 2 dB đối với mỗi trường hợp không thu được đúng bản tin.
Thủ tục đo được lặp lại cho đến khi thu đúng bản tin trong ba lần liên tiếp. Ghi lại mức tín hiệu vào.
– Giảm mức tín hiệu vào 1 dB và ghi lại giá trị mới.
– Sau đó phát tín hiệu đo kiểm bình thường (mục B.2) 20 lần. Trong mỗi trường hợp, nếu không thu được đúng bản tin thì phải tăng mức tín hiệu vào 1 dB và ghi lại giá trị mới.
Nếu thu được đúng bản tin thì không được thay đổi mức tín hiệu vào cho đến khi ba bản tin liên tiếp đều thu được đúng. Trong trường hợp này, giảm mức tín hiệu vào 1 dB và ghi lại giá trị mới.
Không ghi lại mức tín hiệu vào trừ khi có sự thay đổi mức trước đó.
Độ nhạy khả dụng cực đại là trung bình cộng của các giá trị (tương ứng với tỷ lệ bản tin đúng là 80. Ghi lại giá trị này.
– Lặp lại phép đo ở các điều kiện đo kiểm tới hạn (theo 3.1.1.2.1 và 3.1.1.2.2 áp dụng đồng thời).
2.3.2. Triệt nhiễu đồng kênh
2.3.2.1. Định nghĩa
Triệt nhiễu đồng kênh là số đo khả năng của máy thu để thu tín hiệu mong muốn mà không vượt quá độ suy giảm cho trước do sự xuất hiện của tín hiệu điều chế không mong muốn, cả hai tín hiệu đều cùng ở tần số danh định của máy thu.
2.3.2.2. Giới hạn
Giá trị của tỷ số triệt nhiễu đồng kênh, tính theo dB, như sau:
Nằm trong khoảng -8,0 dB và 0 dB, đối với các khoảng cách kênh 25 kHz;
Nằm trong khoảng -12,0 dB và 0 dB, đối với các khoảng cách kênh 12,5 kHz.
2.3.2.3. Phương pháp đo
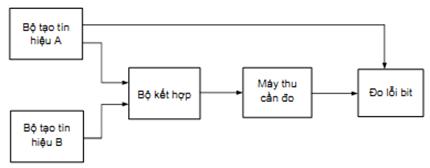
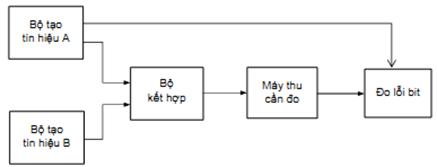
2.3.2.3.1. Phương pháp đo với dòng bit liên tục
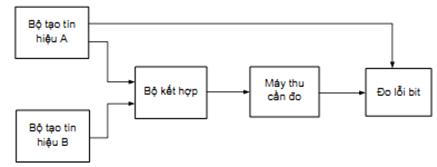
Hình 17 – Sơ đồ đo
Thủ tục đo như sau:
a. Nối hai bộ tạo tín hiệu (A và B) với máy thu qua bộ kết hợp (mục B.1);
Tín hiệu mong muốn (từ bộ tạo tín hiệu A) phải ở tần số danh định của máy thu và được điều chế với các tín hiệu đo kiểm bình thường D-M2 (mục B.2).
Tín hiệu không mong muốn (từ bộ tạo tín hiệu B) phải được điều chế với tín hiệu A-M3 (mục B.2).
Cả hai tín hiệu vào phải ở tần số danh định của máy thu cần đo.
b. Đầu tiên, tắt (trong khi vẫn duy trì trở kháng đầu ra) bộ tạo tín hiệu B (tín hiệu không mong muốn).
Điều chỉnh mức tín hiệu mong muốn từ bộ tạo tín hiệu A cao hơn mức giới hạn của độ nhạy khả dụng cực đại (mục B.6) 3 dB, tại các cổng vào của máy thu (nghĩa là cao hơn 6 dB so với 1 V emf ở các điều kiện đo kiểm bình thường).
c. Sau đó bật bộ tạo tín hiệu B và điều chỉnh mức tín hiệu không mong muốn cho tới khi đạt được tỷ số lỗi bit là 10–1 hoặc xấu hơn.
d. Phát tín hiệu đo kiểm bình thường D-M2 trong khi quan sát tỷ số lỗi bit.
e. Giảm mức tín hiệu không mong muốn theo các bước 1 dB cho tới khi đạt được tỷ số lỗi bit là 10-2 hoặc tốt hơn. Ghi lại mức tín hiệu không mong muốn.
f. Với mỗi tần số của tín hiệu không mong muốn, tỷ số triệt nhiễu đồng kênh phải được biểu diễn là tỷ số (tính theo dB) của mức tín hiệu không mong muốn trên mức tín hiệu mong muốn, ở đầu vào máy thu.
Ghi lại tỷ số này.
g. Lặp lại phép đo với sự dịch chuyển tín hiệu không mong muốn 12% khoảng cách kênh.
h. Triệt nhiễu đồng kênh của thiết bị cần đo là giá trị thấp nhất trong 3 giá trị được tính trong bước f) và được tính theo dB.
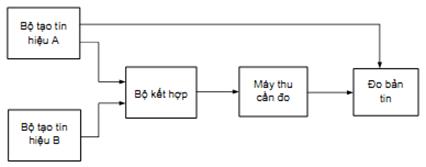
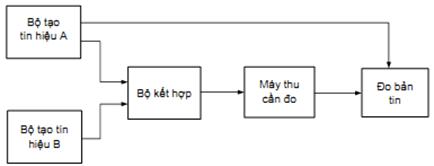
2.3.2.3.2. Phương pháp đo với các bản tin
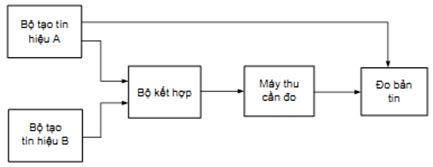
Hình 18 – Sơ đồ đo
Thủ tục đo như sau:
a. Nối hai bộ tạo tín hiệu (A và B) với máy thu qua bộ kết hợp (mục B.1);
Tín hiệu mong muốn (từ bộ tạo tín hiệu A) phải ở tần số danh định của máy thu và được điều chế với các tín hiệu đo kiểm bình thường (mục B.2).
Tín hiệu không mong muốn (từ bộ tạo tín hiệu B) phải được điều chế với tín hiệu A-M3 (mục B.2).
Cả hai tín hiệu vào phải ở tần số danh định của máy thu cần đo.
b. Đầu tiên, tắt (trong khi vẫn duy trì trở kháng đầu ra) bộ tạo tín hiệu B (tín hiệu không mong muốn).
Điều chỉnh mức tín hiệu mong muốn từ bộ tạo tín hiệu A cho đến khi cao hơn mức giới hạn của độ nhạy khả dụng cực đại (mục B.6) 3 dB, tại các cổng vào của máy thu (nghĩa là cao hơn 6 dB so với 1 µV emf ở các điều kiện đo kiểm bình thường).
c. Sau đó bật bộ tạo tín hiệu B và điều chỉnh mức tín hiệu không mong muốn cho tới khi đạt được tỷ số bản tin đúng thấp hơn 10%.
d. Phát lại tín hiệu đo kiểm bình thường (mục B.2) khi quan sát trong mỗi trường hợp kể cả khi thu đúng bản tin hay không.
Giảm mức tín hiệu không mong muốn 2 dB trong mỗi trường hợp mà không thu được đúng bản tin.
Lặp lại thủ tục cho đến khi thu được đúng bản tin trong ba lần liên tiếp. Sau đó ghi lại mức của tín hiệu vào.
e. Tăng mức tín hiệu không mong muốn 1 dB và ghi lại giá trị mới.
Sau đó phát tín hiệu đo kiểm bình thường (mục B.2) 20 lần. Trong mỗi trường hợp, nếu không thu được đúng bản tin thì phải tăng mức tín hiệu vào 1 dB và ghi lại giá trị mới.
Không ghi lại mức tín hiệu vào trừ khi có sự thay đổi mức trước đó.
Ghi lại trung bình cộng của các giá trị (tương ứng với tỷ lệ bản tin đúng là 80%).
f. Với mỗi tần số của tín hiệu không mong muốn, tỷ số triệt nhiễu đồng kênh phải được biểu diễn là tỷ số (tính theo dB) của mức trung bình được ghi lại ở bước trên mức tín hiệu mong muốn, ở đầu vào máy thu.
Ghi lại tỷ số này.
g. Lặp lại phép đo với sự dịch chuyển tín hiệu không mong muốn 12% khoảng cách kênh.
h. Triệt nhiễu đồng kênh của thiết bị cần đo là giá trị thấp nhất trong 3 giá trị được tính theo bước f và được tính theo dB.
2.3.3. Độ chọn lọc kênh lân cận
2.3.3.1. Định nghĩa
Độ chọn lọc kênh lân cận là số đo khả năng của máy thu khi thu tín hiệu mong muốn mà không vượt quá độ suy giảm cho trước do có tín hiệu không mong muốn ở tần số cách tần số của tín hiệu mong muốn một khoảng cách bằng độ phân cách kênh lân cận của thiết bị.
2.3.3.2. Giới hạn
Độ chọn lọc kênh lân cận đối với các khoảng cách kênh khác nhau không được thấp hơn các giá trị trong Bảng 6.
Bảng 6 – Độ chọn lọc kênh lân cận
|
|
Khoảng cách kênh |
|
|
12,5 kHz |
25 kHz |
|
|
Các điều kiện đo bình thường |
60,0 dB |
70,0 dB |
|
Các điều kiện đo tới hạn |
50,0 dB |
60,0 dB |
2.3.3.3. Phương pháp đo
2.3.3.3.1. Phương pháp đo với dòng bit liên tục
Hình 19 – Sơ đồ đo
Thủ tục đo như sau:
a. Nối hai bộ tạo tín hiệu (A và B) với máy thu qua bộ kết hợp (mục B.1);
Tín hiệu mong muốn (từ bộ tạo tín hiệu A) phải ở tần số danh định của máy thu và được điều chế với tín hiệu đo kiểm bình thường D-M2 (mục B.2).
Tín hiệu không mong muốn (từ bộ tạo tín hiệu B) phải được điều chế với tín hiệu A-M3 (mục B.2) và có tần số bằng tần số của kênh nằm kề trên kênh của tín hiệu mong muốn.
b. Đầu tiên, tắt (trong khi vẫn duy trì trở kháng đầu ra) bộ tạo tín hiệu B (tín hiệu không mong muốn).
Điều chỉnh mức tín hiệu mong muốn từ bộ tạo tín hiệu A cho đến khi cao hơn mức giới hạn của độ nhạy khả dụng cực đại mục B.6 (dữ liệu hoặc bản tin) 3 dB, tại các cổng vào của máy thu (nghĩa là cao hơn 6 dB so với 1 µV emf ở các điều kiện đo kiểm bình thường).
c. Sau đó bật bộ tạo tín hiệu B và điều chỉnh mức tín hiệu không mong muốn cho tới khi đạt được tỷ số lỗi bit là 10-1 hoặc xấu hơn.
d. Phát tín hiệu đo kiểm bình thường D-M2 trong khi quan sát tỷ số lỗi bit.
e. Giảm mức tín hiệu không mong muốn theo các bước 1 dB cho tới khi đạt được tỷ số lỗi bit là 10-2 hoặc tốt hơn. Ghi lại mức tín hiệu không mong muốn.
f. Với mỗi kênh lân cận, độ chọn lọc phải được biểu diễn là tỷ số (tính theo dB) của mức tín hiệu không mong muốn trên mức tín hiệu mong muốn, ở đầu vào máy thu.
Ghi lại tỷ số này.
g. Lặp lại phép đo với tín hiệu không mong muốn ở tần số của kênh lân cận mà có tần số thấp hơn tần số kênh của tín hiệu mong muốn.
h. Độ chọn lọc kênh lân cận là giá trị thấp hơn trong hai giá trị đo được trong các kênh lân cận của kênh đang thu.
i. Lặp lại phép đo ở các điều kiện đo tới hạn (3.1.1.2.1 và 3.1.1.2.2 áp dụng đồng thời) với mức tín hiệu mong muốn (như xác định trong mục B.6) tăng 6 dB.
2.3.3.3.2. Phương pháp đo với các bản tin
Hình 20 – Sơ đồ đo
Thủ tục đo như sau:
a.Nối hai bộ tạo tín hiệu (A và B) với máy thu qua bộ kết hợp (mục B.1);
Tín hiệu mong muốn (từ bộ tạo tín hiệu A) phải ở tần số danh định của máy thu và được điều chế với các tín hiệu đo kiểm bình thường (mục B.2).
Tín hiệu không mong muốn (từ bộ tạo tín hiệu B) phải được điều chế với tín hiệu A- M3 (mục B.2) và có tần số bằng tần số của kênh nằm kề trên kênh của tín hiệu mong muốn.
b.Đầu tiên, tắt (trong khi vẫn duy trì trở kháng đầu ra) bộ tạo tín hiệu B (tín hiệu không mong muốn).
Điều chỉnh mức tín hiệu mong muốn từ bộ tạo tín hiệu A cho đến khi cao hơn mức giới hạn của độ nhạy khả dụng cực đại trong mục B.6 (dữ liệu hoặc bản tin) 3 dB, tại các cổng vào của máy thu (nghĩa là cao hơn 6 dB so với 1 V emf ở các điều kiện đo kiểm bình thường).
c. Sau đó bật bộ tạo tín hiệu B và điều chỉnh mức tín hiệu không mong muốn cho tới khi đạt được tỷ số bản tin đúng thấp hơn 10%.
Phát lại tín hiệu đo kiểm bình thường (mục B.2) khi quan sát trong mỗi trường hợp kể cả khi thu đúng bản tin hay không.
Giảm mức tín hiệu không mong muốn 2 dB trong mỗi trường hợp mà không thu được đúng bản tin.
d.Lặp lại thủ tục cho đến khi thu được đúng bản tin trong ba lần liên tiếp. Sau đó ghi lại mức của tín hiệu vào.
e.Tăng mức tín hiệu không mong muốn 1 dB và ghi lại giá trị mới.
Sau đó phát tín hiệu đo kiểm bình thường (mục B.2) 20 lần. Trong mỗi trường hợp, nếu không thu được đúng bản tin thì phải giảm mức tín hiệu không mong muốn 1 dB và ghi lại giá trị mới.
Nếu thu được đúng bản tin thì không được thay đổi mức tín hiệu không mong muốn cho đến khi ba bản tin liên tiếp đều thu được đúng. Trong trường hợp này, tăng mức tín hiệu không mong muốn 1 dB và ghi lại giá trị mới.
Không ghi lại mức tín hiệu vào trừ khi có sự thay đổi mức trước đó.
Ghi lại trung bình cộng của các giá trị (tương ứng với tỷ lệ bản tin đúng là 80%).
f. Với mỗi kênh lân cận, độ chọn lọc phải được biểu diễn là tỷ số (tính theo dB) của mức trung bình trên mức tín hiệu mong muốn, ở đầu vào máy thu.
Ghi lại giá trị này.
g. Lặp lại phép đo với tín hiệu không mong muốn ở tần số của kênh lân cận nằm kề dưới kênh của tín hiệu mong muốn.
h. Độ chọn lọc kênh lân cận của thiết bị cần đo là giá trị thấp hơn trong hai giá trị đo được ở các kênh lân cận của kênh đang thu.
i. Lặp lại phép đo ở các điều kiện đo tới hạn (3.1.1.2.1 và 3.1.1.2.2 áp dụng đồng thời) với mức tín hiệu mong muốn (như xác định trong mục B.6) tăng 6 dB.
2.3.4 Triệt đáp ứng giả
2.3.4.1 Định nghĩa
Triệt đáp ứng giả là số đo khả năng của máy thu khi thu tín hiệu mong muốn mà không vượt quá độ suy giảm cho trước do có tín hiệu không mong muốn ở bất kỳ tần
số nào mà có đáp ứng giả.
2.3.4.2 Giới hạn
Tại tần số bất kỳ cách tần số danh định của máy thu một khoảng bằng 2 khoảng cách kênh hoặc nhiều hơn, triệt đáp ứng giả không được thấp hơn 70,0 dB.
2.3.4.3 Phương pháp đo
2.3.4.3.1 Giới thiệu phương pháp đo
Để xác định các tần số mà có đáp ứng giả, phải thực hiện các tính toán sau:
a. Tính “dải tần giới hạn”:
Dải tần giới hạn được định nghĩa là tần số của tín hiệu dao động nội (fLO) cấp cho bộ trộn thứ nhất của máy thu cộng hoặc trừ tổng các tần số trung tần (fI1,…, fIn) và một nửa dải tần của các kênh cài đặt sẵn (sr) của máy thu;
Do đó, tần số fl của dải tần giới hạn là:
![]()
b. Tính các tần số ngoài dải tần giới hạn:
Tính các tần số mà tại đó có đáp ứng giả ở ngoài dải tần giới hạn được thực hiện cho các dải tần liên quan còn lại;
Các tần số ngoài dải tần giới hạn bằng các hài của tín hiệu bộ dao động nội (fLO) cấp cho bộ trộn thứ nhất của máy thu cộng hoặc trừ tần số trung tần thứ nhất (fI1) của máy thu;
Do đó các tần số của những đáp ứng giả này là: nfLO fI1, trong đó n là số nguyên lớn hơn hoặc bằng 2.
Phép đo đáp ứng ảnh thứ nhất của máy thu được thực hiện đầu tiên để kiểm tra việc tính toán các tần số có đáp ứng giả.
Với các tính toán ở trên, nhà sản xuất phải công bố tần số của máy thu, tần số của tín hiệu dao động nội (fLO) cấp cho bộ trộn thứ nhất của máy thu, các tần số trung tần (fI1, fI2,…), và dải tần của các kênh cài đặt sẵn (sr) của máy thu.
2.3.4.3.2 Phương pháp dò trong dải tần giới hạn
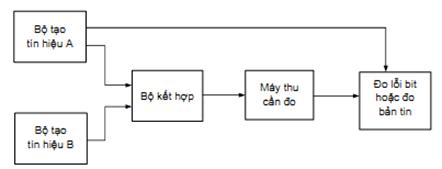
Hình 21 – Sơ đồ đo
Thủ tục đo như sau:
a. Nối hai bộ tạo tín hiệu (A và B) với máy thu qua bộ kết hợp (mục B.1).
Tín hiệu mong muốn (từ bộ tạo tín hiệu A) phải ở tần số danh định của máy thu và được điều chế với tín hiệu đo kiểm bình thường (mục B.2).
Tín hiệu không mong muốn (từ bộ tạo tín hiệu B) phải được điều chế với tín hiệu A- M3 (mục B.2).
b. Đầu tiên, tắt (trong khi vẫn duy trì trở kháng đầu ra) bộ tạo tín hiệu B (tín hiệu không mong muốn).
Điều chỉnh mức tín hiệu mong muốn từ bộ tạo tín hiệu A cho đến khi cao hơn mức giới hạn của độ nhạy khả dụng cực đại (được xác định trong mục B.6) 3 dB, tại các cổng vào của máy thu (nghĩa là cao hơn 6 dB so với 1 µV emf ở các điều kiện đo kiểm bình thường).
Trong trường hợp sử dụng dòng bit liên tục, tỷ số lỗi bit của máy thu sau khi giải điều chế phải được ghi lại.
c. Sau đó bật bộ tạo tín hiệu B và điều chỉnh mức tín hiệu không mong muốn tới 86 dBµV tại các cổng vào máy thu.
Thay đổi tần số của bộ tạo tín hiệu không mong muốn theo các bước 5 kHz trong dải tần giới hạn (2.3.4.3.1.a)) và theo các tần số được tính ngoài dải tần giới hạn này (2.3.4.3.1.b)).
d. Ghi lại tần số của bất kỳ đáp ứng giả nào mà phát hiện được trong khi dò để sử dụng trong các phép đo ở 2.3.4.3.2 và 2.3.4.3.3.
e. Trường hợp không thể sử dụng dòng bit liên tục thì có thể sử dụng một phương pháp tương tự. Khi đó thay cho việc nhận ra đáp ứng giả do tăng tỷ số lỗi bit bằng việc nhận ra đáp ứng giả do giảm tỷ số bản tin thành công.
2.3.4.3.3. Phương pháp đo với các dòng bit liên tục
Sơ đồ đo như trong Hình 23. Thủ tục đo như sau:
a. Nối hai bộ tạo tín hiệu (A và B) với máy thu qua bộ kết hợp (mục B.1).
Tín hiệu mong muốn (từ bộ tạo tín hiệu A) phải ở tần số danh định của máy thu và được điều chế với tín hiệu đo kiểm bình thường D–M2 (mục B.2).
Tín hiệu không mong muốn (từ bộ tạo tín hiệu B) phải được điều chế với tần số 400 Hz và với độ lệch 12% khoảng cách kênh (A-M3) (mục B.2), và phải ở tần số mà cần kiểm tra đáp ứng giả.
b. Đầu tiên, tắt (trong khi vẫn duy trì trở kháng đầu ra) bộ tạo tín hiệu B (tín hiệu không mong muốn).
Điều chỉnh mức tín hiệu mong muốn từ bộ tạo tín hiệu A cho đến khi cao hơn mức giới hạn của độ nhạy khả dụng cực đại trong mục B.6 (dữ liệu hoặc bản tin) 3 dB, tại các cổng vào của máy thu (nghĩa là cao hơn 6 dB so với 1 V emf ở các điều kiện đo kiểm bình thường).
c. Sau đó bật bộ tạo tín hiệu B và điều chỉnh mức tín hiệu không mong muốn cho tới khi đạt được tỷ số lỗi bit là 10-1 hoặc xấu hơn.
d. Phát tín hiệu đo kiểm bình thường D-M2 trong khi quan sát tỷ số lỗi bit.
e. Giảm mức tín hiệu không mong muốn theo các bước 1 dB cho tới khi đạt được tỷ số lỗi bit là 10-2 hoặc tốt hơn. Ghi lại mức tín hiệu không mong muốn.
f. Với mỗi tần số, triệt đáp ứng giả phải được biểu diễn là tỷ số (tính theo dB) của mức tín hiệu không mong muốn trên mức tín hiệu mong muốn, ở đầu vào máy thu.
Ghi lại tỷ số này.
g. Lặp lại phép đo tại tất cả các tần số có đáp ứng giả được phát hiện khi dò tìm trong “dải tần giới hạn” (mục 2.3.4.3.1.a)) và tại các tần số có đáp ứng giả (2.3.4.3.1.b)) được tính cho dải tần từ fRx/3,2 hoặc 30 MHz (chọn số lớn hơn) đến 3,2 x fRx (fRx là tần số danh định của máy thu).
h.Triệt đáp ứng giả của thiết bị cần đo là giá trị thấp nhất trong các giá trị được ghi ở bước f).
2.3.4.3.4. Phương pháp đo với các bản tin
Sơ đồ đo như trong Hình 23. Thủ tục đo như sau:
a. Nối hai bộ tạo tín hiệu (A và B) với máy thu qua bộ kết hợp (mục B.1);
Tín hiệu mong muốn (từ bộ tạo tín hiệu A) phải ở tần số danh định của máy thu và được điều chế với các tín hiệu đo kiểm bình thường (mục B.2).
Tín hiệu không mong muốn (từ bộ tạo tín hiệu B) phải được điều chế với tần số 400 Hz và với độ lệch 12% khoảng cách kênh (A-M3) (mục B.2), và phải ở tần số mà cần kiểm tra đáp ứng giả.
b. Đầu tiên, tắt (trong khi vẫn duy trì trở kháng đầu ra) bộ tạo tín hiệu B (tín hiệu không mong muốn).
Điều chỉnh mức tín hiệu mong muốn từ bộ tạo tín hiệu A cho đến khi cao hơn mức giới hạn của độ nhạy khả dụng cực đại (mục B.6) 3 dB, tại các cổng vào của máy thu (nghĩa là cao hơn 6 dB so với 1 µV emf ở các điều kiện đo kiểm bình thường).
c. Sau đó bật bộ tạo tín hiệu B và điều chỉnh mức tín hiệu không mong muốn cho tới khi đạt được tỷ số bản tin đúng thấp hơn 10%.
d. Phát lại tín hiệu đo kiểm bình thường (mục B.2) khi quan sát trong mỗi trường hợp kể cả khi thu đúng bản tin hay không.
Giảm mức tín hiệu không mong muốn 2 dB trong mỗi trường hợp mà không thu được đúng bản tin.
e.Lặp lại thủ tục cho đến khi thu được đúng bản tin trong ba lần liên tiếp. Sau đó ghi lại mức của tín hiệu vào.
Tăng mức tín hiệu không mong muốn 1 dB và ghi lại giá trị mới.
Sau đó phát tín hiệu đo kiểm bình thường (mục B.2) 20 lần. Trong mỗi trường hợp, nếu không thu được đúng bản tin thì phải giảm mức tín hiệu không mong muốn 1 dB và ghi lại giá trị mới.
Nếu thu được đúng bản tin thì không được thay đổi mức tín hiệu không mong muốn cho đến khi ba bản tin liên tiếp đều thu được đúng. Trong trường hợp này, tăng mức tín hiệu không mong muốn 1 dB và ghi lại giá trị mới.
Không ghi lại mức tín hiệu vào trừ khi có sự thay đổi mức trước đó.
Ghi lại trung bình cộng của các giá trị (tương ứng với tỷ lệ bản tin đúng là 80%) trong các bước d) và e).
f. Với mỗi tần số, triệt đáp ứng giả phải được biểu diễn là tỷ số (tính theo dB) của mức tín hiệu không mong muốn trên mức tín hiệu mong muốn, ở đầu vào máy thu.
Ghi lại tỷ số này.
g. Lặp lại phép đo tại tất cả các tần số có đáp ứng giả được phát hiện khi dò tìm trong “dải tần giới hạn” (2.3.4.3.1.a)) và tại các tần số có đáp ứng giả được tính cho dải tần từ fRx/3,2 hoặc 30 MHz (chọn số lớn hơn) đến 3,2 x fRx (fRx là tần số danh định của máy thu).
h. Triệt đáp ứng giả của thiết bị cần đo là giá trị thấp nhất trong các giá trị được ghi ở bước f).
2.3.5. Triệt đáp ứng xuyên điều chế
2.3.5.1. Định nghĩa
Triệt đáp ứng xuyên điều chế là số đo khả năng của máy thu khi thu tín hiệu mong muốn mà không vượt quá độ suy giảm cho trước do có hai hoặc nhiều tín hiệu không mong muốn có mối liên hệ về tần số được qui định so với với tần số tín hiệu mong muốn.
2.3.5.2. Giới hạn
Tỷ số triệt đáp ứng xuyên điều chế không được thấp hơn 70,0 dB đối với thiết bị
trạm gốc và 65,0 dB đối với thiết bị cầm tay và di động.
2.3.5.3. Phương pháp đo
2.3.5.3.1. Phương pháp đo với dòng bit liên tục
Thủ tục đo như sau:
a. Nối ba bộ tạo tín hiệu (A, B và C) với máy thu qua bộ kết hợp (mục B.1);
Tín hiệu mong muốn (từ bộ tạo tín hiệu A) phải ở tần số danh định của máy thu và được điều chế với tín hiệu đo kiểm bình thường D-M2 (mục B.2).
Tín hiệu không mong muốn thứ nhất (từ bộ tạo tín hiệu B) phải không được điều chế.
Điều chỉnh tín hiệu này tới tần số cao hơn tần số danh định của máy thu 50 kHz.
Tín hiệu không mong muốn thứ hai (từ bộ tạo tín hiệu C) phải được điều chế với tín hiệu A-M3 (mục B.2) và được điều chỉnh tới tần số cao hơn tần số danh định của máy thu 100 kHz.
b. Đầu tiên, tắt (trong khi vẫn duy trì trở kháng đầu ra) các bộ tạo tín hiệu B và C (các tín hiệu không mong muốn).
Điều chỉnh mức tín hiệu mong muốn từ bộ tạo tín hiệu A cho đến khi cao hơn mức hạn của độ nhạy khả dụng cực đại xác định trong mục B.6 (số liệu hoặc bản tin) 3 dB, tại các cổng vào của máy thu (nghĩa là cao hơn 6 dB so với 1 V emf ở các điều kiện đo kiểm bình thường).
c. Sau đó bật các bộ tạo tín hiệu B và C. Các mức của hai tín hiệu không mong muốn phải được giữ bằng nhau và được điều chỉnh mức tín hiệu không mong muốn cho tới khi đạt được tỷ số lỗi bit là 10-1 hoặc xấu hơn.
d. Phát tín hiệu đo kiểm bình thường D-M2 trong khi quan sát tỷ số lỗi bit.
e. Giảm mức các tín hiệu không mong muốn theo các bước 1 dB cho tới khi đạt được tỷ số lỗi bit là 10-2 hoặc tốt hơn. Ghi lại mức tín hiệu không mong muốn.
f. Với mỗi trường hợp thay đổi các tín hiệu không mong muốn, triệt đáp ứng xuyên điều chế phải được biểu diễn là tỷ số (tính theo dB) của các mức tín hiệu không mong muốn trên mức tín hiệu mong muốn, ở đầu vào máy thu.
Ghi lại tỷ số này.
g. Lặp lại phép đo với bộ tạo tín hiệu không mong muốn B có tần số thấp hơn tần số tín hiệu mong muốn 50 kHz và bộ tạo tín hiệu không mong muốn C có tần số thấp hơn tần số tín hiệu mong muốn 100 kHz.
h.Triệt đáp ứng xuyên điều chế của thiết bị cần đo là giá trị thấp hơn trong hai giá trị được ghi ở bước f).
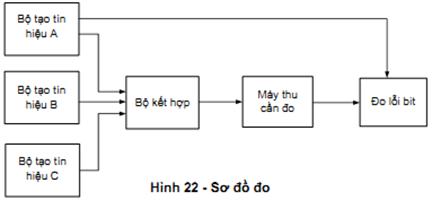
2.3.5.3.2 Phương pháp đo với các bản tin
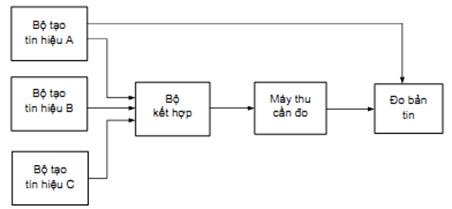
Hình 23 – Sơ đồ đo
Thủ tục đo như sau:
a. Nối ba bộ tạo tín hiệu (A, B và C) với máy thu qua bộ kết hợp (mục B.1);
Tín hiệu mong muốn (từ bộ tạo tín hiệu A) phải ở tần số danh định của máy thu và được điều chế với tín hiệu đo kiểm bình thường (mục B.2).
Tín hiệu không mong muốn thứ nhất (từ bộ tạo tín hiệu B) phải không được điều chế.
Điều chỉnh tín hiệu này tới tần số cao hơn tần số danh định của máy thu 50 kHz.
Tín hiệu không mong muốn thứ hai (từ bộ tạo tín hiệu C) phải được điều chế với tín hiệu A-M3 (mục B.2) và được điều chỉnh tới tần số cao hơn tần số danh định của máy thu 100 kHz.
b. Đầu tiên, tắt (trong khi vẫn duy trì trở kháng đầu ra) các bộ tạo tín hiệu B và C (các tín hiệu không mong muốn).
Điều chỉnh mức tín hiệu mong muốn từ bộ tạo tín hiệu A cho đến khi cao hơn mức giới hạn của độ nhạy khả dụng cực đại (được xác định trong mục B.6, số liệu hoặc bản tin) 3 dB, tại các cổng vào của máy thu (nghĩa là cao hơn 6 dB so với 1 µV emf ở các điều kiện đo kiểm bình thường).
c. Sau đó bật các bộ tạo tín hiệu B và C. Các mức của hai tín hiệu không mong muốn phải được giữ bằng nhau và được điều chỉnh mức các tín hiệu không mong muốn cho tới khi đạt được tỷ số bản tin thành công thấp hơn 10%.
d. Phát lại tín hiệu đo kiểm bình thường (mục B.2) khi quan sát trong mỗi trường hợp kể cả khi thu đúng bản tin hay không.
Giảm mức các tín hiệu không mong muốn 2 dB mỗi khi không thu đúng bản tin.
Lặp lại thủ tục cho đến khi thu đúng bản tin trong ba lần liên tiếp. Ghi lại các mức tín hiệu vào.
e. Tăng các mức tín hiệu không mong muốn 1 dB và ghi lại giá trị mới.
Sau đó phát tín hiệu đo kiểm bình thường (mục B.2) 20 lần. Với mỗi trường hợp không thu được đúng bản tin, giảm các mức tín hiệu không mong muốn 1 dB và ghi lại giá trị mới. Nếu bản tin thu được đúng, mức của các tín hiệu không mong muốn phải không được thay đổi cho tới khi thu được đúng ba 3 bản tin liên tiếp. Trong trường hợp này, các tín hiệu không mong muốn phải được tăng 1 dB và ghi lại giá trị mới.
Không ghi lại mức tín hiệu vào trừ khi có sự thay đổi mức trước đó.
Ghi lại trung bình cộng của các giá trị (tương ứng với tỷ lệ bản tin đúng là 80%) trong các bước d) và e).
f. Với mỗi trường hợp thay đổi các tín hiệu không mong muốn, triệt đáp ứng xuyên điều chế phải được biểu diễn là tỷ số (tính theo dB) của mức trung bình được ghi lại trong bước e) trên mức tín hiệu mong muốn ở đầu vào máy thu.
Ghi lại tỷ số này.
g. Lặp lại phép đo với bộ tạo tín hiệu không mong muốn B có tần số thấp hơn tần số tín hiệu mong muốn 50 kHz và bộ tạo tín hiệu không mong muốn C có tần số thấp hơn tần số tín hiệu mong muốn 100 kHz.
h. Triệt đáp ứng xuyên điều chế của thiết bị cần đo là giá trị thấp hơn trong hai giá trị bước f.
2.3.6 Nghẹt
2.3.6.1 Định nghĩa
Nghẹt là số đo khả năng của máy thu khi thu tín hiệu mong muốn mà không vượt quá độ suy giảm cho trước do có tín hiệu không mong muốn tại bất kỳ tần số nào không phải là tần số có đáp ứng giả hoặc tần số của các kênh lân cận.
2.3.6.2 Giới hạn
Tỷ số nghẹt tại tần số bất kỳ trong các dải tần xác định không được thấp hơn 84,0 dB, ngoại trừ tại các tần số có đáp ứng giả (theo 2.3.4).
2.3.6.3 Phương pháp đo
2.3.6.3.1 Phương pháp đo với các dòng bit liên tục
Hình 24 – Sơ đồ đo
Thủ tục đo như sau:
a. Nối hai bộ tạo tín hiệu (A và B) với máy thu qua bộ kết hợp (mục B.1);
Tín hiệu mong muốn (từ bộ tạo tín hiệu A) phải ở tần số danh định của máy thu và được điều chế với tín hiệu đo kiểm bình thường D-M2 (mục B.2).
Tín hiệu không mong muốn (từ bộ tạo tín hiệu B) phải không được điều chế và phải nằm tại tần số cách tần số danh định của máy thu từ 1 MHz đến 10 MHz.
Thực tế, các phép đo phải được thực hiện tại các tần số tín hiệu không mong muốn xấp xỉ ±1 MHz, ±2 MHz, ±5 MHz và ±10 MHz, tránh các tần số có đáp ứng giả.
b. Đầu tiên, tắt (trong khi vẫn duy trì trở kháng đầu ra) bộ tạo tín hiệu B (tín hiệu không mong muốn).
Điều chỉnh mức tín hiệu mong muốn từ bộ tạo tín hiệu A cho đến khi cao hơn mức giới hạn của độ nhạy khả dụng cực đại xác định trong mục B.6 (số liệu hoặc bản tin)
3 dB, tại các cổng vào của máy thu (nghĩa là cao hơn 6 dB so với 1 µV emf ở các điều kiện đo kiểm bình thường).
c. Sau đó bật bộ tạo tín hiệu B và điều chỉnh mức tín hiệu không mong muốn cho tới khi đạt được tỷ số lỗi bit là 10-1 hoặc xấu hơn.
d. Phát tín hiệu đo kiểm bình thường D-M2 trong khi quan sát tỷ số lỗi bit.
e. Giảm mức tín hiệu không mong muốn theo các bước 1 dB cho tới khi đạt được tỷ số lỗi bit là 10-2 hoặc tốt hơn. Ghi lại mức tín hiệu không mong muốn.
f. Với mỗi tần số, nghẹt được biểu diễn là tỷ số (tính theo dB) của mức tín hiệu không mong muốn trên mức tín hiệu mong muốn, ở đầu vào máy thu.
Ghi lại tỷ số này.
g. Lặp lại phép đo tại tất cả các tần số được xác định như trên.
h. Chỉ tiêu nghẹt của thiết bị cần đo là giá trị thấp nhất trong các giá trị được ghi ở bước f.
2.3.6.3.2 Phương pháp đo với các bản tin
Hình 25 – Sơ đồ đo
Thủ tục đo như sau:
a. Nối hai bộ tạo tín hiệu (A và B) với máy thu qua bộ kết hợp (mục B.1);
Tín hiệu mong muốn (từ bộ tạo tín hiệu A) phải ở tần số danh định của máy thu và được điều chế với tín hiệu đo kiểm bình thường D-M2 (mục B.2).
Tín hiệu không mong muốn (từ bộ tạo tín hiệu B) phải không được điều chế và phải nằm tại tần số cách tần số danh định của máy thu từ 1 MHz đến 10 MHz.
Thực tế, các phép đo phải được thực hiện tại các tần số tín hiệu không mong muốn xấp xỉ ±1 MHz, ±2 MHz, ±5 MHz và ±10 MHz, tránh các tần số có đáp ứng giả .
b. Đầu tiên, tắt (trong khi vẫn duy trì trở kháng đầu ra) bộ tạo tín hiệu B (tín hiệu không mong muốn).
Điều chỉnh mức tín hiệu mong muốn từ bộ tạo tín hiệu A cho đến khi cao hơn mức giới hạn của độ nhạy khả dụng cực đại xác định trong mục B.6 (số liệu hoặc bản tin)
3 dB, tại các cổng vào của máy thu (nghĩa là cao hơn 6 dB so với 1 µV emf ở các điều kiện đo kiểm bình thường).
c. Sau đó bật bộ tạo tín hiệu B và điều chỉnh mức tín hiệu không mong muốn cho tới khi đạt được tỷ số bản tin thành công thấp hơn 10%.
d. Phát lại tín hiệu đo kiểm bình thường (mục B.2) khi quan sát trong mỗi trường hợp kể cả khi thu đúng bản tin hay không.
Giảm mức tín hiệu không mong muốn 2 dB trong mỗi trường hợp mà không thu được đúng bản tin.
Lặp lại thủ tục cho đến khi thu được đúng bản tin trong ba lần liên tiếp. Sau đó ghi lại mức của tín hiệu vào.
e. Tăng mức tín hiệu không mong muốn 1 dB và ghi lại giá trị mới.
Sau đó phát tín hiệu đo kiểm bình thường (mục B.2) 20 lần. Trong mỗi trường hợp, nếu không thu được đúng bản tin thì phải giảm mức tín hiệu không mong muốn 1 dB và ghi lại giá trị mới.
Nếu thu được đúng bản tin thì không được thay đổi mức tín hiệu không mong muốn cho đến khi ba bản tin liên tiếp đều thu được đúng. Trong trường hợp này, tăng mức tín hiệu không mong muốn 1 dB và ghi lại giá trị mới.
Không ghi lại mức tín hiệu vào trừ khi có sự thay đổi mức trước đó.
Ghi lại trung bình cộng của các giá trị (tương ứng với tỷ lệ bản tin đúng là 80%).
f. Với mỗi tần số, nghẹt được đánh giá theo tỷ số (tính theo dB) của mức tín hiệu không mong muốn trên mức tín hiệu mong muốn, ở đầu vào máy thu.
Ghi lại tỷ số này.
g. Lặp lại phép đo tại tất cả các tần số được xác định ở trên.
h. Chỉ tiêu nghẹt của thiết bị cần đo là giá trị thấp nhất trong các giá trị được ghi ở bước f.
2.3.7. Bức xạ giả
2.3.7.1. Định nghĩa
Bức xạ giả từ máy thu là các phát xạ ở bất kỳ tần số nào được bức xạ từ thiết bị và ăng ten của nó. Mức bức xạ giả là:
– Mức công suất tạp ở tải (phát xạ giả dẫn); và
– Công suất bức xạ giả hiệu dụng từ vỏ và thiết bị (bức xạ vỏ máy); hoặc
– Công suất bức xạ giả hiệu dụng từ vỏ và ăng ten liền trong trường hợp thiết bị cầm tay có ăng ten và không có đầu nối RF bên ngoài.
2.3.7.2. Giới hạn
Công suất của bất kỳ bức xạ giả nào không được vượt quá các giá trị trong Bảng 7 và 8.
Bảng 7 – Các thành phần dẫn
|
Dải tần |
Giới hạn |
|
9 kHz đến 1 GHz |
2,0 nW (-57 dBm) |
|
Từ 1 GHz đến 4 GHz, hoặc từ 1 GHz đến 12,75 GHz |
20 nW (-47 dBm) |
Bảng 8 – Các thành phần bức xạ
|
Dải tần |
Giới hạn |
|
30 MHz đến 1 GHz |
2,0 nW (-57 dBm) |
|
Từ 1 GHz đến 4 GHz |
20 nW (-47 dBm) |
Khi đo bức xạ của các máy cầm tay, áp dụng các điều kiện sau:
Với thiết bị có đầu nối ăng ten ngoài, khi đo kiểm phải nối tải giả với đầu nối này; Với thiết bị có ăng ten liền bên trong vẫn giữ ăng ten bình thường.
2.3.7.3 Phương pháp đo mức công suất
Hình 26 – Sơ đồ đo
Phương pháp này chỉ áp dụng đối với thiết bị có đầu nối ăng ten ngoài.
Bức xạ giả được đo theo mức công suất của bất kỳ tín hiệu rời rạc nào tại các cổng vào của máy thu. Các cổng vào máy thu được nối với máy phân tích phổ hoặc vôn kế chọn lọc có trở kháng vào 50Ω; Bật máy thu.
Nếu thiết bị dò không được hiệu chuẩn theo công suất vào thì mức của bất kỳ thành phần nào được tìm thấy phải được xác định bằng phương pháp thay thế sử dụng bộ tạo tín hiệu.
Các phép đo phải được mở rộng trong dải tần 9 kHz đến 4 GHz đối với thiết bị hoạt động ở các tần số không vượt quá 470 MHz. Ngoài ra phải lặp lại các phép đo trong dải tần 4 GHz đến 12,75 GHz đối với thiết bị hoạt động ở các tần số trên 470 MHz.
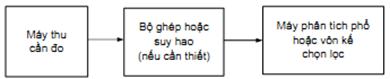
2.3.7.4 Phương pháp đo công suất bức xạ hiệu dụng
1) Máy thu cần đo
2) Ăng ten đo
3) Máy phân tích phổ hoặc vôn kế chọn lọc (Máy thu đo)
Hình 27 – Sơ đồ đo
Thủ tục đo như sau:
a. Tại vị trí đo, thoả mãn các yêu cầu Phụ lục A, mẫu thử được đặt ở độ cao xác định trên giá đỡ cách điện.
Máy thu phải được cấp nguồn thông qua bộ lọc tần số vô tuyến để tránh bức xạ từ các cực của nguồn công suất. b. Nối máy thu với:
Ăng ten giả (mục B.3) đối với thiết bị có đầu nối ăng ten ngoài hoặc Ăng ten liền.
c. Dò tìm bức xạ của các thành phần tạp bằng máy thu và ăng ten đo trong toàn bộ dải tần 30 MHz – 4 GHz.
1) Bộ tạo tín hiệu
2) Ăng ten thay thế
3) Ăng ten đo
4) Máy phân tích phổ hoặc vôn kế chọn lọc (Máy thu đo)
Hình 28 – Sơ đồ đo
d. Tại mỗi tần số dò thấy thành phần tạp, xoay mẫu thử để thu được đáp ứng cực đại và công suất bức xạ hiệu dụng của thành phần tạp được xác định bằng phép đo thay thế, sơ đồ đo như trong Hình 28;
Ghi lại giá trị công suất bức xạ hiệu dụng của thành phần tạp đó.
e. Lặp lại phép đo với ăng ten đo ở mặt phẳng phân cực trực giao;
2.3.8 Giảm nhạy máy thu
2.3.8.1 Định nghĩa
Giảm nhạy là sự suy giảm độ nhạy của máy thu, kết quả của việc chuyển công suất từ máy phát tới máy thu do các hiệu ứng ghép. Nó được tính bằng sự khác nhau theo dB giữa các mức độ nhạy khả dụng cực đại (số liệu hoặc bản tin, dẫn) khi phát đồng thời và không đồng thời.
2.3.8.2 Giới hạn
Giảm độ nhạy không được vượt quá 3,0 dB và giới hạn độ nhạy khả dụng cực đại ở các điều kiện đo kiểm bình thường phải được thoả mãn (xem 2.3.1).
2.3.8.3 Phương pháp đo
2.3.8.3.1 Đo giảm độ nhạy với các dòng bit liên tục
A. Phương pháp đo đối với thiết bị có bộ lọc song công
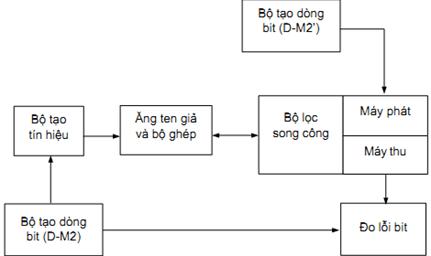
Hình 29 – Sơ đồ đo
Thủ tục đo như sau:
a. Cổng ăng ten của thiết bị gồm máy thu, máy phát và bộ lọc song công phải được nối với ăng ten giả (mục B.3) thông qua bộ ghép.
Bộ tạo tín hiệu được điều chế bằng tín hiệu đo kiểm bình thường D-M2 (mục B.2). Nối bộ tạo tín hiệu với bộ ghép để nó không ảnh hưởng đến phối hợp trở kháng và không tạo ra các sản phẩm xuyên điều chế mà có thể ảnh hưởng đến các kết quả đo.
b. Bật máy phát với công suất sóng mang đầu ra như xác định trong 2.2.2, được điều chế bằng tín hiệu đo kiểm bình thường D-M2’ (mục B.2).
c. Sau đó đo độ nhạy máy thu (số liệu, dẫn) theo 2.3.1.3.1.
Mức đầu ra của bộ tạo tín hiệu được ghi là C và được tính theo dB tương đối so với giá trị hiệu dụng 1 µV.
d. Sau đó tắt máy phát và đo độ nhạy (số liệu, dẫn) máy thu.
e. Mức đầu ra của bộ tạo tín hiệu được ghi là D và được tính theo dB tương đối so với giá trị hiệu dụng 1 µV.
f. Giảm độ nhạy là sai số giữa các giá trị C và D tính theo dB. B. Phương pháp đo đối với thiết bị có hai ăng ten
Thủ tục đo như sau:
a. Nối máy phát với bộ suy hao công suất (để làm giảm công suất RF danh định của máy phát). Giá trị công suất danh định được nhà sản xuất công bố.
Đầu ra của bộ suy hao phải được nối với đầu vào máy thu thông qua bộ ghép nối và một bộ lọc. Tổng suy hao giữa máy phát và máy thu phải là 30 dB.
Bộ tạo tín hiệu phải được điều chế bằng tín hiệu đo kiểm bình thường D-M2 (mục B.2). Nối bộ tạo tín hiệu với bộ ghép sao cho không ảnh hưởng đến phối hợp trở kháng và không tạo ra các sản phẩm xuyên điều chế mà có thể ảnh hưởng đến kết quả đo.
b. Bật máy phát với công suất sóng mang đầu ra như xác định trong 4.2.2, được điều chế bằng tín hiệu đo kiểm bình thường D-M2’ (Mục B.2).
c. Sau đó đo độ nhạy máy thu (số liệu, dẫn) theo 2.3.1.3.1
Mức đầu ra của bộ tạo tín hiệu được ghi là C và được tính theo dB tương đối so với giá trị hiệu dụng 1 µV.
d. Sau đó tắt máy phát và đo độ nhạy (số liệu, dẫn) máy thu.
e.Mức đầu ra của bộ tạo tín hiệu được ghi là D và được tính theo dB tương đối so với giá trị hiệu dụng 1 µV.
f. Giảm độ nhạy là sai số giữa các giá trị C và D tính theo dB.
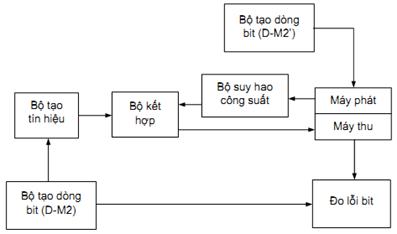
Hình 30 – Sơ đồ đo
2.3.8.3.2. Đo giảm độ nhạy với các bản tin
A. Phương pháp đo đối với thiết bị có bộ lọc song công
Hình 31 – Sơ đồ đo
Thủ tục đo như sau:
a. Cổng ăng ten của thiết bị gồm máy thu, máy phát và bộ lọc song công phải được nối với ăng ten giả (mục B.3) thông qua bộ ghép.
b. Bộ tạo tín hiệu được điều chế bằng tín hiệu đo kiểm bình thường D-M2 (mục B.2). Nối bộ tạo tín hiệu với bộ ghép để nó không ảnh hưởng đến phối hợp trở kháng và không tạo ra các sản phẩm xuyên điều chế mà có thể ảnh hưởng đến các kết quả đo.
c. Bật máy phát với công suất sóng mang đầu ra như xác định trong 2.2.2, được điều chế bằng tín hiệu đo kiểm bình thường D-M4 (Mục B.2). Sử dụng bản tin khác bản tin trong bước a).
d. Sau đó đo độ nhạy máy thu (bản tin, dẫn) theo 2.3.1.3.2.
Mức đầu ra của bộ tạo tín hiệu được ghi là C và được tính theo dB tương đối so với giá trị hiệu dụng 1 µV.
e. Sau đó tắt máy phát và đo độ nhạy (bản tin, dẫn) máy thu.
Mức đầu ra của bộ tạo tín hiệu được ghi là D và được tính theo dB tương đối so với giá trị hiệu dụng 1 µV.
f. Giảm độ nhạy là sai số giữa các giá trị C và D tính theo dB. B. Phương pháp đo đối với thiết bị có hai ăng ten
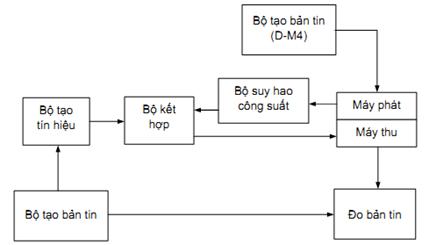
Hình 32 – Sơ đồ đo
Thủ tục đo như sau:
a. Nối máy phát với bộ suy hao công suất (để làm giảm công suất RF danh định của máy phát). Giá trị công suất danh định được nhà sản xuất công bố.
Đầu ra của bộ suy hao phải được nối với đầu vào máy thu thông qua bộ ghép nối và một bộ lọc. Tổng suy hao giữa máy phát và máy thu phải là 30 dB.
Bộ tạo tín hiệu phải được điều chế bằng tín hiệu đo kiểm bình thường (mục B.2). Nối bộ tạo tín hiệu với bộ ghép sao cho không ảnh hưởng đến phối hợp trở kháng và không tạo ra các sản phẩm xuyên điều chế mà có thể ảnh hưởng đến kết quả đo.
b. Bật máy phát với công suất sóng mang đầu ra như xác định trong 2.2.2, được điều chế bằng tín hiệu đo kiểm bình thường D-M4 (mục B.2). Sau đó đo độ nhạy máy thu (bản tin, dẫn) theo 2.3.1.3.2.
Mức đầu ra của bộ tạo tín hiệu được ghi là C và được tính theo dB tương đối so với giá trị hiệu dụng 1 µV.
c. Sau đó tắt máy phát và đo độ nhạy (số liệu, dẫn) máy thu.
e. Mức đầu ra của bộ tạo tín hiệu được ghi là D và được tính theo dB tương đối so với giá trị hiệu dụng 1 µV.
f. Giảm độ nhạy là sai số giữa các giá trị C và D tính theo dB.
2.3.9 Triệt đáp ứng giả máy thu
2.3.9.1 Định nghĩa
Triệt đáp ứng giả (ở chế độ song công) là số đo khả năng của máy thu đạt được tỷ số triệt đáp ứng giả xác định khi thu tín hiệu điều chế mong muốn trong trường hợp có:
– Tín hiệu không mong muốn ở bất kỳ tần số nào khác mà có thể có đáp ứng.
– Tín hiệu không điều chế của máy phát hoạt động ở khoảng cách tần số song công, tại công suất ra danh định và bị suy hao bởi bộ lọc song công hoặc do khoảng cách giữa các ăng ten.
2.3.9.2 Giới hạn
Tại tần số bất kỳ nào cách tần số danh định của máy thu 2 khoảng cách kênh hoặc nhiều hơn, tỷ số triệt đáp ứng giả phải lớn hơn: 67,0 dB.
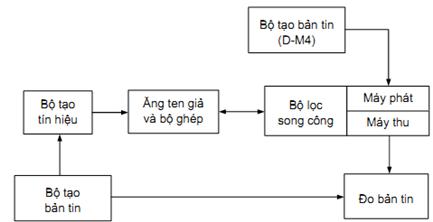
2.3.9.3 Phương pháp đo
Triệt đáp ứng giả của máy thu ở chế độ song công được đo như trong mục 4.3.4 với sơ đồ đo như trong 2.3.8.3.1 hoặc 2.3.8.3.2 ngoại trừ là máy phát phải không được điều chế. Máy phát phải hoạt động với công suất sóng mang đầu ra như xác định trong 2.2.2.
Thực hiện phép đo xung quanh các tần số fm được tính như sau:
(p)ft + (q)fm = fr và fm = (n)ft ± fI1;
Trong đó:
ft là tần số máy phát;
fr là tần số máy thu; và
fI1 là trung tần 1 của máy thu. n ≥ 2
Đặc biệt chú ý đến các giá trị sau:
(p) = -1, (q) = 2 và (p) = 2, (q) = -1
Cần chú ý rằng phương pháp đo có thể gây ra sai số do ảnh hưởng của hiện tượng xuyên điều chế của bộ tạo tín hiệu. Để khắc phục những sai số này, cần sử dụng bộ lọc chặn dải tại các tần số phát, cùng với mạng kết hợp bộ tạo tín hiệu.
3. PHƯƠNG PHÁP ĐO KIỂM
3.1. Các điều kiện môi trường
3.1.1. Các điều kiện đo bình thường và tới hạn
Các phép đo phải được thực hiện ở các điều kiện đo bình thường và khi có chỉ dẫn phải thực hiện ở các điều kiện đo tới hạn.
3.1.1.1 Các điều kiện đo bình thường
3.1.1.1.1 Nhiệt độ và độ ẩm bình thường
Các điều kiện nhiệt độ và độ ẩm bình thường khi đo kiểm là các nhiệt độ và độ ẩm nằm trong các khoảng sau:
Nhiệt độ: +150C đến +350C;
Độ ẩm tương đối: 20% đến 75%.
3.1.1.1.2 Nguồn điện đo kiểm bình thường a) Điện áp lưới
Điện áp đo kiểm bình thường đối với thiết bị nối với lưới điện phải là điện áp danh định của lưới. Trong khuôn khổ của Quy chuẩn này, điện áp danh định là điện áp được công bố hoặc bất kỳ điện áp nào được thiết kế cho thiết bị.
Tần số nguồn công suất đo kiểm của mạng điện xoay chiều phải nằm giữa 49 Hz và 51 Hz.
b) Nguồn điện ắc quy chì-axít sử dụng trên các phương tiện
Khi thiết bị vô tuyến sử dụng trên phương tiện dùng nguồn ắc quy chì-axít, điện áp đo kiểm bình thường bằng 1,1 lần điện áp danh định của ắc quy.
c) Các nguồn điện khác
Khi sử dụng các nguồn điện hoặc ắc quy khác, điện áp đo kiểm bình thường phải là điện áp do nhà sản xuất công bố.
3.1.1.2 Các điều kiện đo kiểm tới hạn
3.1.1.2.1 Nhiệt độ tới hạn
Khi đo kiểm ở nhiệt độ tới hạn, các phép đo phải được thực hiện theo các thủ tục trong mục 5.1.1.3 ở các nhiệt độ cận trên và cận dưới trong khoảng sau:
Từ -200C đến +550C.
Với ghi chú trong Bảng 1, mục 2.2.1.2, dải nhiệt độ tới hạn là từ 00C đến +300C phải được sử dụng khi thích hợp.
Các báo cáo đo phải ghi rõ dải nhiệt độ được sử dụng.
3.1.1.2.2 Các điện áp nguồn đo kiểm tới hạn a) Điện áp lưới
Điện áp đo kiểm tới hạn đối với thiết bị được nối tới nguồn điện xoay chiều phải là điện áp danh định của lưới 10%.
b) Nguồn điện ắc quy chì-axít sử dụng trên các phương tiện
Khi thiết bị vô tuyến sử dụng trên phương tiện dùng nguồn ắc quy chì-axít, điện áp đo kiểm bình thường bằng 1,3 và 0,9 lần điện áp danh định của ắc quy.
c) Các nguồn ắc quy khác
Nhiệt độ tới hạn dưới đối với thiết bị có nguồn ắc quy như sau:
Với ắc quy Leclanche hoặc Lithi:
0,85 lần điện áp danh định của ắc quy. Với ắc quy thuỷ ngân hoặc niken-catmi:
0,9 lần điện áp danh định của ắc quy. Không có điện áp đo kiểm tới hạn trên.
Trong trường hợp không có điện áp tới hạn trên như ở trên, có thể dùng điện áp danh định, tương ứng với bốn điều kiện đo kiểm tới hạn là:
Vmin/Tmin, Vmin/Tmax;
(Vmax = danh định)/Tmin, (Vmax = danh định)/Tmax
d) Các nguồn điện khác
Khi sử dụng các nguồn điện hoặc ắc quy khác, điện áp đo kiểm tới hạn phải là điện áp do nhà sản xuất lựa chọn hoặc được sự đồng ý giữa nhà sản xuất thiết bị và phòng thử nghiệm. Điều này phải được ghi lại trong báo cáo đo.
3.1.1.3 Thủ tục đo tại các nhiệt độ tới hạn
Trước khi thực hiện phép đo, thiết bị phải đạt được cân bằng nhiệt trong phòng đo. Thiết bị phải được tắt trong quá trình ổn định nhiệt độ.
Trong trường hợp thiết bị có mạch ổn định nhiệt độ hoạt động liên tục, các mạch này phải được bật trong thời gian 15 phút sau khi đạt được cân bằng nhiệt, và sau đó thiết bị phải đạt được các yêu cầu xác định.
Nếu không kiểm tra được cân bằng nhiệt bởi các phép đo, chu kỳ ổn định nhiệt độ phải ít nhất là 1 giờ hoặc với thời gian lâu hơn mà được phòng thử nghiệm quyết định. Thứ tự đo phải được lựa chọn và độ ẩm của phòng đo được điều chỉnh sao cho không diễn ra hiện tượng ngưng tụ.
3.1.1.3.1 Thủ tục đo đối với thiết bị hoạt động liên tục
Nếu nhà sản xuất công bố rằng thiết bị được thiết kế hoạt động liên tục, khi đó thủ tục đo như sau:
Trước khi đo ở các nhiệt độ tới hạn trên, thiết bị phải được đặt trong phòng đo cho đến khi đạt được cân bằng nhiệt. Sau đó bật thiết bị ở trạng thái phát trong thời gian một nửa giờ, sau thời gian này thiết bị phải đạt được các yêu cầu xác định.
Trước khi đo ở nhiệt độ tới hạn dưới, thiết bị phải được đặt trong phòng đo cho đến khi đạt được cân bằng nhiệt, sau đó chuyển tới trạng thái chờ hoặc thu trong thời gian một giờ, sau thời gian này thiết bị phải đạt được các yêu cầu xác định.
3.1.1.3.2 Thủ tục đo đối với thiết bị hoạt động không liên tục
Nếu nhà sản xuất công bố rằng thiết bị được thiết kế hoạt động không liên tục, khi đó thủ tục đo như sau:
Trước khi đo ở các nhiệt độ tới hạn trên, thiết bị phải được đặt trong phòng đo cho đến khi đạt được cân bằng nhiệt. Sau đó bật thiết bị ở trạng thái phát trong thời gian một phút, tiếp theo là 4 phút ở trạng thái thu, sau thời gian này thiết bị phải đạt được các yêu cầu xác định.
Trước khi đo ở nhiệt độ tới hạn dưới, thiết bị phải được đặt trong phòng đo cho đến khi đạt được cân bằng nhiệt, sau đó chuyển tới trạng thái chờ hoặc thu trong thời gian một phút, sau thời gian này thiết bị phải đạt được các yêu cầu xác định.
3.1.2. Nguồn công suất đo kiểm
Khi đo, nguồn công suất của thiết bị phải được thay bằng một nguồn công suất đo kiểm có khả năng cung cấp các điện áp đo kiểm bình thường và tới hạn như xác định theo 3.1.1.1.2 và 3.1.1.2.2. Trở kháng trong của nguồn công suất đo kiểm phải đủ nhỏ để ảnh hưởng của nó tới các kết quả đo là không đáng kể. Với mục đích đo kiểm, điện áp nguồn công suất phải được đo ở đầu vào của thiết bị.
Nếu thiết bị có cáp công suất nối cố định, điện áp đo kiểm phải là điện áp được đo ở điểm nối cáp công suất với thiết bị.
Đối với các thiết bị sử dụng pin, pin phải được tháo ra và nguồn công suất đo phải có chỉ tiêu kỹ thuật giống với pin thực tế.
Trong khi đo kiểm, các điện áp nguồn công suất phải có dung sai ±1% so với điện áp khi bắt đầu mỗi phép đo. Giá trị dung sai này là giới hạn đối với các phép đo công suất.
3.1.3. Lựa chọn thiết bị đo
Nhà sản xuất phải cung cấp một hoặc nhiều mẫu thiết bị đo kiểm phù hợp.
Nếu thiết bị có một số tính năng tùy chọn, cần phải xem xét không để ảnh hưởng đến các tham số tần số vô tuyến, tiếp theo chỉ cần thực hiện các phép đo trên thiết bị có cấu hình kết hợp các tính năng được xem là đầy đủ nhất như đề nghị của nhà sản xuất và được sự đồng ý của phòng thử nghiệm.
3.2. Đánh giá kết quả đo
Việc đánh giá các kết quả đối với các phép đo được ghi lại trong báo cáo đo như sau:
i. Giá trị đo được so với giới hạn tương ứng sẽ được sử dụng để quyết định xem thiết bị có thoả mãn các yêu cầu của Quy chuẩn kỹ thuật quốc gia hay không.
j. Giá trị độ không đảm bảo đo của mỗi tham số đo phải được ghi trong báo cáo đo.
k. Giá trị độ không đảm bảo đo (đối với mỗi phép đo) phải bằng hoặc thấp hơn các giá trị trong Bảng 9.
Với phương pháp đo (theo Quy chuẩn kỹ thuật quốc gia), các giá trị độ không đảm bảo đo phải được tính theo ETR 028 và phải tương ứng với hệ số khai triển k = 1,96 hoặc k = 2 (có độ tin cậy là 95% và 95,45% trong trường hợp các đặc tính phân bố của độ không đảm bảo đo là chuẩn (Gauss)).
Bảng 9 dựa trên các hệ số khai triển này.
Hệ số khai triển thực tế được sử dụng để ước lượng độ không đảm bảo đo phải được công bố.
Bảng 9 – Độ không đảm bảo đo tuyệt đối: các giá trị cực đại
|
Tham số |
Độ không đảm bảo đo |
|
Tần số vô tuyến |
±1 x 10-7 |
|
Công suất RF dẫn (lên đến 160 W) |
±0,75 dB |
|
Công suất RF bức xạ |
±6 dB |
|
Công suất kênh lân cận |
±5 dB |
|
Độ nhạy trung bình (bức xạ) |
±3 dB |
|
Đo hai tín hiệu, lên đến 4 GHz (dùng bộ ghép đo) |
±4 dB |
|
Đo hai tín hiệu sử dụng trường bức xạ (xem ghi chú) |
±6 dB |
|
Đo ba tín hiệu (dùng bộ ghép đo) |
±3 dB |
|
Phát xạ giả dẫn của máy phát, lên đến 12,75 GHz |
±4 dB |
|
Phát xạ giả dẫn của máy thu, lên đến 12,75 GHz |
±3 dB |
|
Phát xạ bức xạ của máy phát, lên đến 4 GHz |
±6 dB |
|
Phát xạ bức xạ của máy thu, lên đến 4 GHz |
±6 dB |
|
Tần số quá độ của máy phát (lệch tần số) Thời gian quá độ của máy phát |
±250 Hz ±20% |
|
CHÚ THÍCH: Các giá trị có hiệu lực tới 1 GHz đối với các tham số RF, trừ khi có công bố khác. |
|
4. QUY ĐỊNH VỀ QUẢN LÝ
Các thiết bị vô tuyến thuộc phạm vi điều chỉnh quy định tại điều 1.1 phải tuân thủ các quy định kỹ thuật trong Quy chuẩn này.
5. TRÁCH NHIỆM CỦA TỔ CHỨC, CÁ NHÂN
Các tổ chức, cá nhân liên quan có trách nhiệm thực hiện các quy định về chứng nhận hợp quy và công bố hợp quy các thiết bị vô tuyến lưu động mặt đất có ăng ten rời dùng cho truyền số liệu (và thoại) và chịu sự kiểm tra của cơ quan quản lý nhà nước theo các quy định hiện hành.
6. TỔ CHỨC THỰC HIỆN
6.1 Cục Viễn thông và các Sở Thông tin và Truyền thông có trách nhiệm tổ chức hướng dẫn triển khai quản lý các thiết bị vô tuyến lưu động mặt đất có ăng ten rời dùng cho truyền số liệu (và thoại) theo Quy chuẩn này.
6.2. Quy chuẩn này được áp dụng thay thế tiêu chuẩn ngành mã số TCN 68-229:2005 “Thiết bị vô tuyến lưu động mặt đất có ăng ten rời dùng cho truyền số liệu (và thoại) – Yêu cầu kỹ thuật”.
6.3 Trong trường hợp các quy định nêu tại Quy chuẩn này có sự thay đổi, bổ sung hoặc được thay thế thì thực hiện theo quy định tại văn bản mới./.
Phụ lục A
(Quy định)
Đo trường bức xạ
A.1. Các vị trí đo và sơ đồ chung cho các phép đo có sử dụng trường bức xạ
Phần này giới thiệu 3 vị trí đo thông dụng nhất được sử dụng cho các phép đo bức xạ: phòng đo không phản xạ, phòng đo không phản xạ có mặt đất và vị trí đo vùng mở (OATS). Cả hai phép đo tuyệt đối và tương đối có thể được thực hiện ở những vị trí này. Khi thực hiện các phép đo tuyệt đối, phòng đo phải được kiểm tra
A.1.1. Phòng đo không phản xạ
Phòng không phản xạ là phòng được bao quanh và lớp tường, sàn nhà, trần nhà bên trong được phủ vật liệu hấp thụ sóng vô tuyến thường có dạng bọt hình chóp. Phòng đo thường có cột đỡ ăng ten ở một đầu và bàn xoay ở đầu kia. Một kiểu phòng đo không phản xạ được chỉ trong Hình A.1.
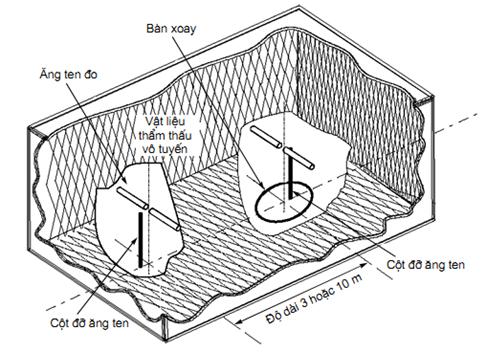
Hình A.1- Phòng đo không phản xạ
Phòng đo được bao quanh và phủ vật liệu hấp thụ vô tuyến tạo ra một môi trường được kiểm soát phục vụ mục đích đo. Kiểu phòng đo này mô phỏng các điều kiện không gian tự do.
Việc bao bọc tạo ra một không gian đo, làm giảm mức nhiễu tín hiệu cũng như các ảnh hưởng khác từ bên ngoài, trong khi vật liệu hấp thụ vô tuyến làm giảm sự phản xạ không mong muốn từ tường và trần nhà có thể ảnh hưởng đến các phép đo. Thực tế, có thể dễ dàng che chắn để có các mức triệt nhiễu môi trường cao (80 dB đến 140 dB), thường thì làm cho mức nhiễu môi trường là không đáng kể.
Bàn xoay có khả năng xoay 3600 trong mặt phẳng nằm ngang và được sử dụng để đặt mẫu thử (EUT) ở độ cao phù hợp so với mặt đất. Phòng đo phải đủ rộng để cho phép khoảng cách đo ít nhất là 3 m hoặc 2(d1 + d2)2/λ (m), chọn số lớn hơn. Khoảng cách được sử dụng trong các phép đo thực tế phải được ghi trong kết quả đo.
Phòng đo không phản xạ thường có một số lợi thế hơn so với các phòng đo khác.
Đó là giảm nhiễu môi trường, giảm các phản xạ từ sàn, trần và tường bao quanh đồng thời không phụ thuộc vào điều kiện thời tiết. Tuy nhiên nó cũng có một số nhược điểm là có khoảng cách đo bị giới hạn và việc sử dụng tần số thấp cũng bị giới hạn do kích thước của vật liệu hấp thụ hình chóp.
Tất cả các phép đo phát xạ, độ nhạy và sự miễn nhiễm có thể thực hiện trong phòng đo không phản xạ mà không bị các hạn chế ở trên.
A.1.2. Phòng đo không phản xạ có mặt sàn dẫn điện
Phòng đo không phản xạ có mặt sàn dẫn điện là phòng được bao quanh và lớp tường, trần nhà bên trong được phủ vật liệu hấp thụ sóng vô tuyến và có dạng bọt hình chóp. Sàn bằng kim loại không phủ vật liệu hấp thụ. Phòng đo thường có cột đỡ ăng ten ở một đầu và bàn xoay ở đầu kia. Một kiểu phòng đo không phản xạ có mặt sàn dẫn điện được chỉ trong Hình A.2.
Trong phòng đo này, mặt sàn tạo ra đường phản xạ mong muốn, do đó tín hiệu nhận được bởi ăng ten thu là tổng các tín hiệu từ các đường truyền trực tiếp và phản xạ. Điều này tạo ra một mức tín hiệu thu duy nhất ở mỗi độ cao của ăng ten phát (hoặc EUT) và ăng ten thu so với mặt sàn.
Cột đỡ ăng ten có thể thay đổi được độ cao (từ 1 m đến 4 m) để ăng ten có thể đặt được ở vị trí thu được tín hiệu tổng hợp cực đại giữa các ăng ten hoặc giữa EUT và ăng ten đo.
Bàn xoay có khả năng xoay 3600 trong mặt phẳng nằm ngang và được sử dụng để đặt mẫu thử (EUT) ở độ cao xác định so với mặt đất, thường là 1,5 m. Phòng đo phải đủ rộng để cho phép khoảng cách đo ít nhất là 3 m hoặc 2(d1 +d2)2/λ (m), chọn số lớn hơn. Khoảng cách được sử dụng trong các phép đo thực tế phải được ghi trong kết quả đo.
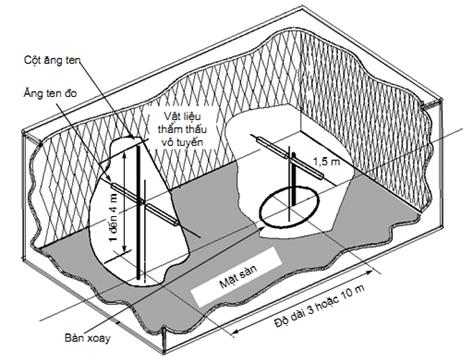
Hình A.2 – Phòng đo không phản xạ có mặt sàn dẫn điện
Trong các phép đo phát xạ, việc thứ nhất là tìm cường độ trường lớn nhất từ EUT bằng cách nâng hoặc hạ ăng ten đo trên cột (để thu được tín hiệu giao thoa cực đại của các tín hiệu trực tiếp và phản xạ từ EUT) và sau đó xoay bàn xoay để tìm giá trị cực đại trong mặt phẳng phương vị. Tại độ cao này của ăng ten đo, ghi lại biên độ của tín hiệu thu. Việc thứ hai là thay EUT bằng ăng ten thay thế (được đặt ở điểm giữa của EUT) mà được nối với bộ tạo tín hiệu. Tiếp tục dò tìm giá trị đỉnh của tín hiệu và điều chỉnh đầu ra của bộ tạo tín hiệu cho đến khi đo lại được mức như trong bước một trên máy thu.
Với các phép đo độ nhạy máy thu trên mặt sàn, cũng tìm giá trị cường độ trường lớn nhất bằng cách nâng và hạ ăng ten đo trên trục để thu được tín hiệu giao thoa cực đại của các tín hiệu trực tiếp và phản xạ. Ăng ten đo được giữ ở độ cao như trong bước 2 đồng thời ăng ten đo được thay thế bằng EUT. Giảm biên độ của tín hiệu phát để xác định mức cường độ trường mà tại đó thu được đáp ứng xác định từ EUT.
A.1.3. Vị trí đo vùng mở
Vị trí đo vùng mở gồm một bàn xoay ở một đầu và một cột đỡ ăng ten có thể thay đổi độ cao ở đầu kia. Mặt sàn, trong trường hợp lý tưởng, dẫn điện tốt và có thể mở rộng không hạn chế. Thực tế, việc dẫn điện tốt có thể thực hiện được còn kích cớ của mặt sàn bị giới hạn. Một vị trí đo vùng mở được chỉ trong Hình A.3.
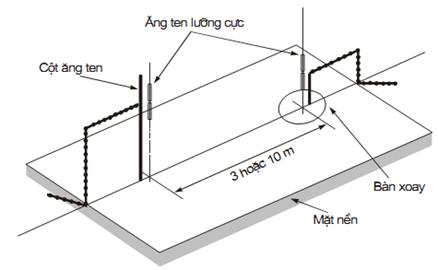
Hình A.3 – Vị trí đo vùng mở
Mặt sàn tạo ra đường phản xạ mong muốn, do đó tín hiệu thu được bởi ăng ten thu là tổng các tín hiệu từ các đường truyền trực tiếp và phản xạ. Điều này tạo ra một mức tín hiệu thu duy nhất ở mỗi độ cao của ăng ten phát (hoặc EUT) và ăng ten thu so với mặt sàn.
Phẩm chất của vị trí đo liên quan đến vị trí ăng ten, bàn xoay, khoảng cách đo và các sắp xếp khác giống như phòng đo không phản xạ có mặt sàn dẫn điện. Các phép đo bức xạ trong OATS giống như thực hiện trong phòng đo không phản xạ có mặt sàn dẫn điện.
Sơ đồ đo điển hình đối với các vị trí đo có mặt sàn dẫn điện được chỉ trong Hình A.4.
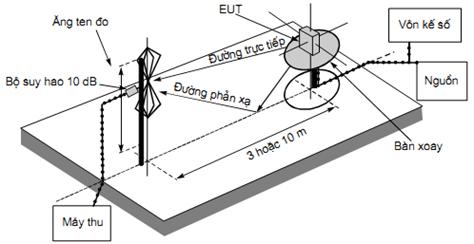
Hình A.4 – Sơ đồ đo trên vị trí đo có mặt sàn dẫn điện
(thiết lập OATS cho các phép đo phát xạ giả)
A.1.4. Ăng ten đo
Ăng ten đo thường được sử dụng trong các phương pháp đo bức xạ. Trong các phép đo phát xạ (sai số tần số, công suất bức xạ hiệu dụng, phát xạ giả và công suất kênh lân cận), ăng ten đo được sử dụng để dò trường bức xạ từ EUT trong giai đoạn 1 của phép đo và từ ăng ten thay thế trong các giai đoạn khác. Khi sử dụng vị trí đo để đo các đặc tính máy thu (độ nhạy và các tham số miễn nhiễm khác), ăng ten được sử dụng như thiết bị phát.
Ăng ten thay thế được lắp trên một cột cho phép ăng ten được sử dụng cho cả phân cực đứng và phân cực ngang. Ngoài ra, ở vị trí mặt sàn dẫn điện (các phòng đo không phản xạ có mặt sàn dẫn điện và các vị trí đo vùng mở) có thể thay đổi độ cao (tính từ tâm ăng ten đo xuống mặt đất) trong một khoảng xác định (thường từ 1 m đến 4 m).
Trong băng tần 30 MHz đến 1000 MHz, các ăng ten lưỡng cực thường được sử dụng. Đối với các tần số cao hơn 80 MHz, các lưỡng cực phải có độ dài sao cho cộng hưởng ở tần số đo. Thấp hơn 80 MHz, nên dùng lưỡng cực có độ dài ngắn hơn.
A.1.5. Ăng ten thay thế
Ăng ten thay thế được sử dụng để thay thế EUT đối với các phép đo các tham số máy phát (sai số tần số, công suất bức xạ hiệu dụng, phát xạ giả và công suất kênh lân cận). Đối với các phép đo ở băng tần 30 MHz đến 1000 MHz, ăng ten thay thế phải là ăng ten lưỡng cực. Với các tần số lớn hơn 80 MHz, các lưỡng cực phải có độ dài sao cho cộng hưởng ở tần số đo. Thấp hơn 80 MHz, nên dùng lưỡng cực có độ dài ngắn hơn.
Phụ lục B
(Quy định)
Các điều kiện chung
B.1.Cấp các tín hiệu đo tới đầu vào máy thu
Nguồn tín hiệu đo cấp tới đầu vào máy thu được nối sao cho trở kháng nguồn đối với đầu vào máy thu là 50Ω.
Yêu cầu này phải thoả mãn kể cả khi có một tín hiệu hoặc nhiều tín hiệu sử dụng mạng kết hợp được cấp tới máy thu đồng thời.
Các mức tín hiệu đo ở các đầu vào máy thu (ổ cắm RF) phải được tính theo emf.
Ảnh hưởng của bất kỳ sản phẩm xuyên điều chế và tạp âm sinh ra trong các nguồn tín hiệu đo phải không đáng kể.
B.2. Các tín hiệu đo kiểm bình thường (các tín hiệu mong muốn và không mong muốn)
Khi thiết bị được thiết kế để phát các dòng bit liên tục (số liệu, fax, truyền ảnh, thoại số), tín hiệu đo kiểm bình thường như sau:
– Tín hiệu D-M0, gồm một chuỗi vô hạn các bit 0;
– Tín hiệu D-M1, gồm một chuỗi vô hạn các bit 1;
– Tín hiệu D-M2, gồm một chuỗi bit giả ngẫu nhiên với ít nhất 511 bit theo Khuyến nghị O.153 của ITU-T.
– Tín hiệu D-M2′, có kiểu giống với D-M2, nhưng chuỗi bit giả ngẫu nhiên độc lập so với D-M2 (có thể giống hệt D-M2 nhưng bắt đầu ở một thời điểm khác).
– Tín hiệu A-M3, gồm một tín hiệu RF, được điều chế bằng tín hiệu tần số âm thanh với độ lệch là 12% khoảng cách kênh. Tín hiệu này được sử dụng như tín hiệu không mong muốn.
Việc cấp một chuỗi vô hạn các bit 0 hoặc 1 thường không có dải thông đặc trưng. Tín hiệu D-M2 được sử dụng để đạt gần đúng với dải thông đặc trưng.
Nếu việc truyền dòng bit liên tục không thể thực hiện được, tín hiệu đo kiểm bình thường phải có các bit được mã hoá sửa lỗi hoặc các bản tin. Tín hiệu này có thể được lựa chọn bởi nhà sản xuất hoặc được thoả thuận giữa nhà sản xuất và phòng thử nghiệm, và phải có dải thông chiếm dụng tần số vô tuyến lớn nhất. Chi tiết về tín hiệu thử này phải được ghi trong báo cáo đo.
Trong trường hợp này, bộ mã hoá đi kèm với máy phát phải có khả năng cấp tín hiệu đo kiểm bình thường. Điều chế kết quả được gọi là điều chế đo kiểm bình thường. Nếu có thể, phải điều chế liên tục trong thời gian đo.
Tín hiệu đo D-M4 gồm các bit được mã hoá sửa lỗi, các bản tin được phát liên tiếp nhau. Truyền như vậy là cần thiết đối với các phép đo như công suất kênh lân cận và phát xạ giả.
Tín hiệu A-M3 được sử dụng là tín hiệu không mong muốn đối với các phép đo như triệt nhiễu đồng kênh và độ chọn lọc kênh lân cận.
Chi tiết về D-M3 và D-M4 phải được ghi trong các báo cáo đo.
B.3. Ăng ten giả
Các phép đo phải được thực hiện bằng cách sử dụng ăng ten giả có trở kháng 50Ω không phản xạ, bức xạ và được nối với ổ cắm ăng ten của thiết bị cần kiểm tra.
B.4. Các điểm đo đối với phép đo dòng bit
Thực tế không thể luôn luôn đo dòng bit giao diện vô tuyến. Nhà sản xuất phải xác định các điểm đo thiết bị để thực hiện các phép đo các dòng bit theo các mục 2.2 và 2.3.
Cần chú ý rằng điểm đo thử càng được đặt gần giao diện vô tuyến thì sai số đo càng nhỏ do phép đo ít phụ thuộc vào phần ứng dụng.
Phải thực hiện phép đo ở các điểm đo tương ứng nhau.
Các điểm đo được sử dụng phải được ghi trong các báo cáo đo.
B.5. Các chế độ hoạt động của máy phát
Với mục đích đo của Quy chuẩn kỹ thuật quốc gia này, tốt nhất là sử dụng máy phát không điều chế.
Phương pháp đạt được sóng mang không điều chế hoặc các kiểu mô hình điều chế đặc biệt, nếu phù hợp, có thể được lựa chọn bởi nhà sản xuất hoặc được sự đồng ý giữa nhà sản xuất và phòng thử nghiệm. Điều này phải trình bày trong báo cáo đo.
B.6. Mức tín hiệu mong muốn đối với các phép đo suy giảm (số liệu hoặc bản tin)
Các phép đo suy giảm là những phép đo được thực hiện trên máy thu để kiểm tra sự suy giảm chất lượng của máy thu do có tín hiệu không mong muốn.
Mức của tín hiệu mong muốn đối với các phép đo suy giảm (ở các điều kiện đo kiểm bình thường theo 3.1.1.1) phải có sức điện động là +6 dBV. Đó là giá trị cao hơn độ nhạy khả dụng cực đại (số liệu hoặc bản tin, dẫn) 3 dB.
B.7. Chỉ tiêu của máy phân tích phổ
Có thể sử dụng băng thông phân giải 1 kHz để đo biên độ tín hiệu hoặc tạp âm ở mức cao hơn mức tạp âm của máy phân tích phổ 3 dB hoặc nhiều hơn, như hiển thị trên màn hình, với độ chính xác ±2 dB khi có tín hiệu mong muốn.Độ chính xác của các phép đo biên độ tương đối phải nằm trong khoảng ±1 dB.
Đối với điều chế phân bố thống kê, máy phân tích phổ và bộ tích phân phải xác định được mật độ phổ công suất thực đã được lấy tích phân trong dải thông yêu cầu.
